-Ю 0 10 20 30 40 50 60 70 80 90 100
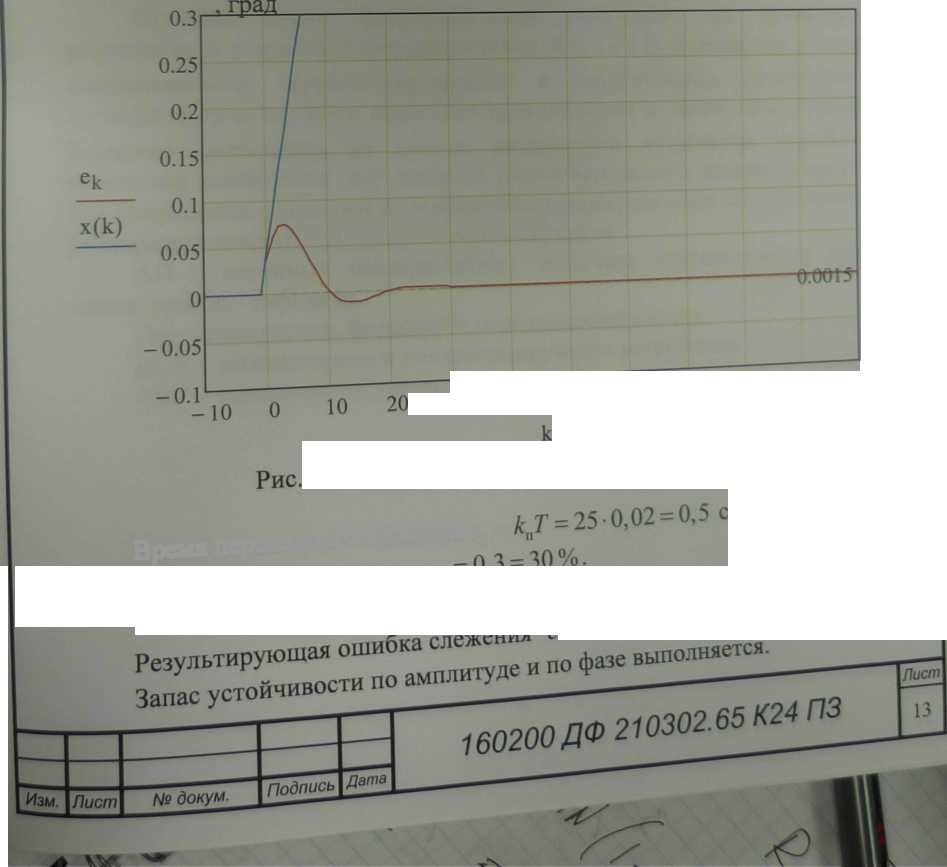
к Рис. 4.4 - Анализ при линейном воздействии
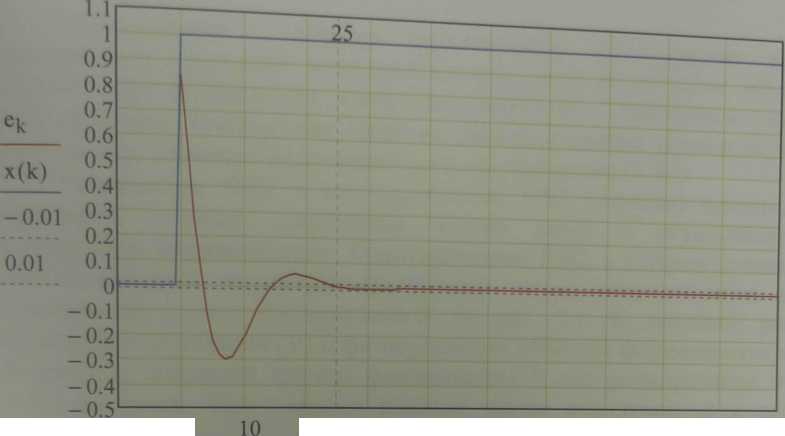
Время переходного процесса ta = кпТ = 25 • 0,02 = 0,5 с. Перерегулирование е = ешх =0,3 = 30 %. Значение шумовой полосы Fw =8,1 Гц. Результирующая ои Запас устойчивости по
160200 ДФ 210302.65 К24 ПЗ
X
Для повышения качества автоматике режиме повысим ки до 1000, проведем пе
|
-10 0 |
 град
град
20 30 40 50 60 70 80 90 100
\
Си,, %
![]() Рис. 4.3 - Анализ при ступенчатом
воздействии
Рис. 4.3 - Анализ при ступенчатом
воздействии
|
|
|
|
|
30 40 50 60 70 80 90 100 |
|
4.4 - Анализ при линейном воздействии |
|
Время переходного процесса , - е«W |
|
Перерегулирование е Значение шумовой полосы /<ш ' |
![]() 5 РЛС автосопровождения по направлению с
использованием ФАР
5 РЛС автосопровождения по направлению с
использованием ФАР
Радиолокация - область радиотехники, использующая явления отражения и излучения электромагнитных волн различными объектами (целями) для обнаружения, измерения координат и параметров движения этих объектов. Технические средства, обеспечивающие радиолокационное наблюдение, называют радиолокационными станциями (РЛС).
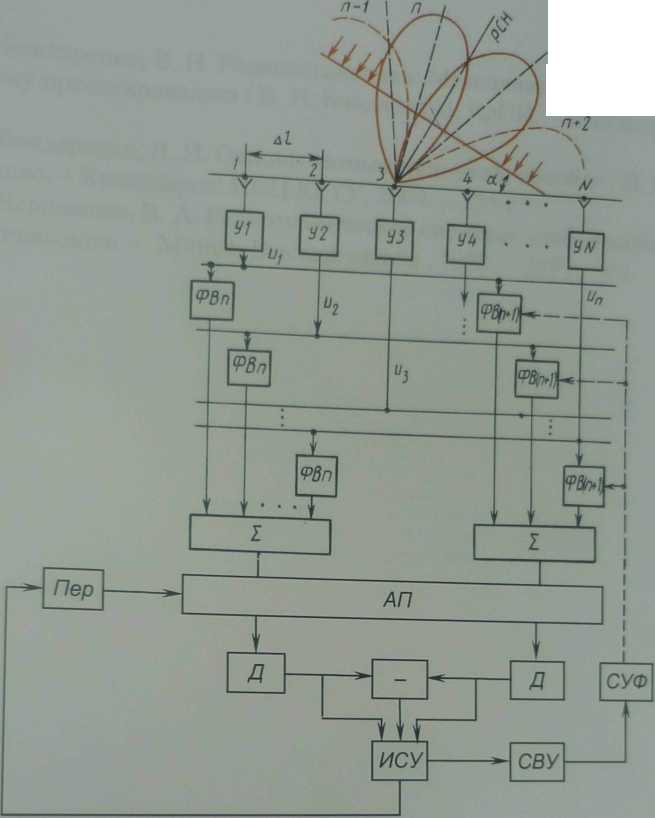
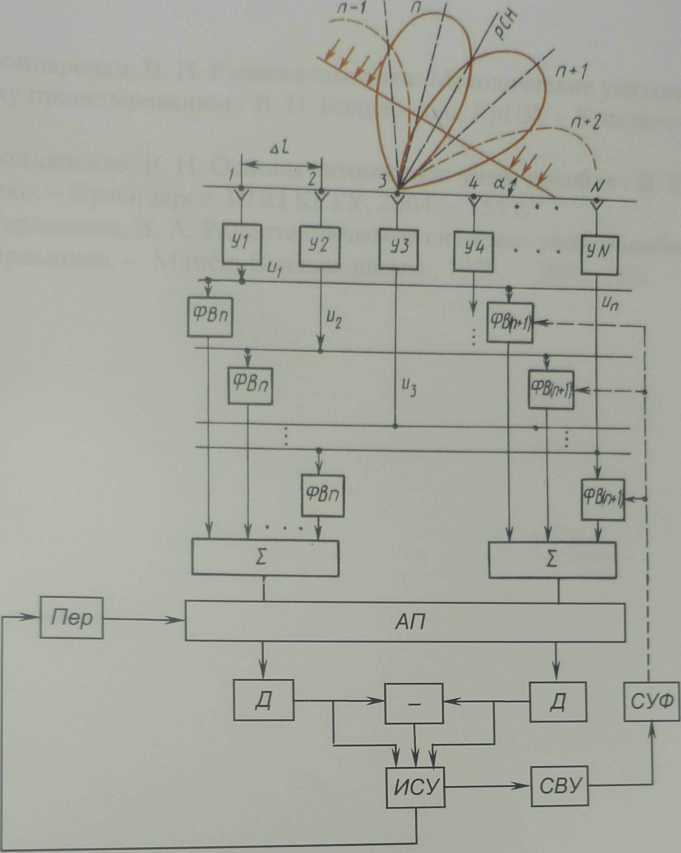
Применение ФАР в многоканальных РЛС позволяет одновременно определять угловые координаты многих целей и осуществлять их непрерывное сопровождение. Многоканальная РЛС, в которой применяется равносигнальный амплитудно-разностный метод сопровождения целей, строится по схеме, представленной на рис. 5.1. К линейной решетке подключены усилители (У) и фазовращатели (ФВ) для формирования лучей. На рисунке показаны группы фазовращателей для формирования п -го и (п + 1)-го лучей. При падении плоской волны под углом а к решетке сигналы на выходе г-го усилителя можно представить в виде ut =U0cos(o)0t + iA(p+(p0), где % - начальная фаза, А(р - приращение фазы сигналов между соседними элементами: A<p=(27iAUA0)sma, Uo -
амплитуда сигнала.
Сигналы после фазовращателей поступают на суммирующие устройства, в результате формируются п -й и (п +1) -й лепестки диаграммы направленности. Продетектированные в квадратичных детекторах (Д) сигналы п -го и (п +1) -го лепестков сравниваются в разностном устройстве.
Значение напряжения на выходе разностного устройства определяется величиной отклонения Аа цели от равносигнального направления (РСН). Это напряжение управляет фазовращателями посредством схемы управления фазовращателями (СУФ) по цепи обратной связи.
АП - антенный переключатель, включает соответственно нужный режим приема / передачи.
Пер - передатчик, формирует передаваемый сигнал.
ИСУ - индикаторное и синхронизирующее устройство.
СВУ - счетно-вычислительное устройство.
![]() Изм
Изм
Лист
№докум.
Подпись
Дата
160200 ДФ 210302.65 К24 ПЗ
Лист
![]() 14
14
 '«*"-е"^^Г „IT""37
" Параме^в »-» ™
'«*"-е"^^Г „IT""37
" Параме^в »-» ™
![]()
![]() одновременно и осуществлять их которой применяется
одновременно и осуществлять их которой применяется
|
строится по подключены На+рисУнке (^D-го луней. При сигналы на выходе |
|
под Углом а к решетке М0ЖН0 представить в виде А<Р ~ приращение фазы |
/ го
|
сигналов |
ГДе гдИТеЛЯ между cocemilw ~ амплитуда сигн!.
УстройСствГвЬпезулСЬТ! f0^1*™* покупают на суммирующие устройства, в результате формируются я-й и („ + !).* лепестки диаграммы
направленности. Продетектированные в квадратичных детекторах (Д) сигналы л-го и (« + 1)-го лепестков сравниваются в разностном устройстве. Значение напряжения на выходе разностного устройства определяется величиной отклонения Аа цели от равносигнального направления (РСН). Это напряжение управляет фазовращателями посредством схемы управления фазовращателями (СУФ) по цепи обратной связи.
АП - антенный переключатель, включает соответственно нужный
режим приема / передачи.
Пер - передатчик, формирует передаваемый сигнал. ИСУ - индикаторное и синхронизирующее устройство. СВУ - счетно-вычислительное устройство.
\
\
|
% |
V
|
|
\
|
|
|
/7*7 |
■5/
|
\ |
\
V
\ «
![]() Рис. 5.1 - Функциональная схема РЛС
сопровождения по
Рис. 5.1 - Функциональная схема РЛС
сопровождения по
направлению с ФАР
|
|
|
II |
![]()
|
|
|
A* J *■
Рис. 5.1 - Функциональная схема РЛС сопровождения по
направлению с ФАР

|
|
|
flua |
№докум.
Литература
1 Бондаренко, В. Н. Радиоавтоматика:
Методические указания по
курсовому
проектированию / В. Н. Бондаренко; КрПИ. - Красноярск 1992 -
32 с.
2 Бондаренко, В. Н. Основы автоматики:
учеб. пособие / В. Н.
Бондаренко.
- Красноярск: ИПЦ КГТУ, 2004. - 155 с.
3 Чердынцев, В. А. Радиотехническое системы: учеб.
пособие для вузов
/ В. А. Чердынцев. - Минск: Высшая
школа, 1988. - 369 с.: ил.
ъ
|
^ |
ъ
|
|
|
|
|
16 |
0200 Дф
210302-
| М-...- I""'""1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.