Могут иметь место и иные варианты построения оптических дистанционных передач, но они не несут в себе каких либо принципиальных отличий.
Электромеханическая система, дистанционной передачи информации.
Электромеханическая система дистанционной передачи информации, как правило, создается на базе индукционного датчика (ИД) ориентации картушки МК. Этот датчик содержит два или три магнитных зонда (часто их называют феррозодами), каждый из которых позволяет определить значение составляющей напряженности измеряемого магнитного поля вдоль своей оси. Совместное использование сигналов этих зондов дает возможность определить направление вектора напряженности магнитного поля, создаваемого картушкой компаса, относительно диаметральной плоскости судна
Принцип действия магнитного зонда
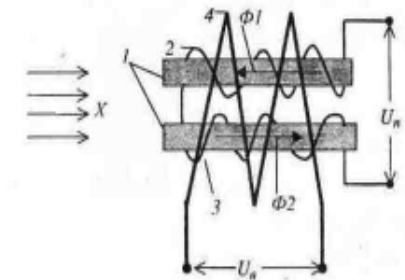
 Магнитный зонд имеет два сердечника 1 выполненные из
магнитомягкого материала с высокой магнитной проницаемостью, например из
пермаилоя. На каждый сердечник наматываются обмотки 2 и 3, имеющие одинаковое
количество витков. Эти обмотки соединяются последовательно и встречно и
питаются напряжением Uп переменного тока. Магнитные потоки Ф1 и Ф2, создаваемые
указанны ми обмотками в любой фиксированный момент времени равны друг другу и
противоположно направлены (рисунок а). Величина этих потоков подбирается таким
образом чтобы стержни при любом значении напряженности измеряемого магнитного
поля гарантированно переводились бы в состояние насыщения. На оба сердечника
наматывается общая обмотка 4, с которой снимается выходной сигнал Uв магнитного
зонда.
Магнитный зонд имеет два сердечника 1 выполненные из
магнитомягкого материала с высокой магнитной проницаемостью, например из
пермаилоя. На каждый сердечник наматываются обмотки 2 и 3, имеющие одинаковое
количество витков. Эти обмотки соединяются последовательно и встречно и
питаются напряжением Uп переменного тока. Магнитные потоки Ф1 и Ф2, создаваемые
указанны ми обмотками в любой фиксированный момент времени равны друг другу и
противоположно направлены (рисунок а). Величина этих потоков подбирается таким
образом чтобы стержни при любом значении напряженности измеряемого магнитного
поля гарантированно переводились бы в состояние насыщения. На оба сердечника
наматывается общая обмотка 4, с которой снимается выходной сигнал Uв магнитного
зонда.
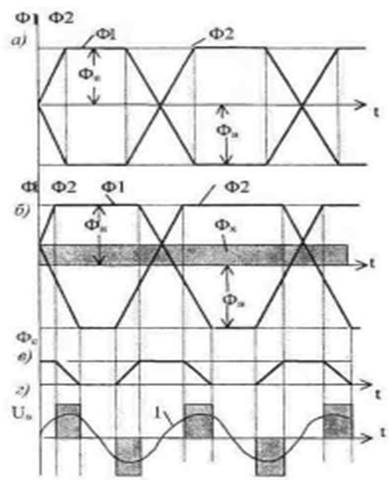
Принцип действия зонда состоит в следующем. При отсутствии внешнего намагничивающего поля Х результирующий магнитный поток Фс = Ф1 – Ф2, связанный с обмоткой 4, будет равен нулю и на ее выходе никакого сигнала не будет.
Если напряжённость Х измеряемого поля не равна нулю, то магнитный поток Фх этого поля в одном стержне будет складываться с потоком подмагничивания, а в другом вычитаться из него. Это приведёт к тому, что оба сердечника будут переходить в режим насыщения не одновременно (рис. б), как это было при Х=0. В результате суммарный магнитный поток Фс, сцепленный с обмоткой 4, будет изменяться так, как это показано на (рис. в). Изменение потока приведет к появлению на выходной обмотке 4 напряжения U, (рис. г), пропорционального степени асимметрии потоков Ф1 и Ф2, а следовательно, и напряжённости измеряемого поля. В связи с тем, что за один период напряжения подмагничивания стержни будут переходить в насыщенное состояние два раза, частота импульсов U. будет в два раза выше частоты напряжения Un. В результате последующей фильтрации напряжение Uв преобразуется к гармоническому виду 1.
Следует отметить, что фаза выходного сигнала магнитного зонда изменяется на противоположную, если вектор напряжённости измеряемого поля меняет свой знак.
Структура системы дистанционной передачи информации
Как уже было указано выше, ИД может содержать в своём составе два или три феррозонда, каждый из которых измеряет составляющую магнитного поля катушки вдоль оси своих сердечников. Он размещается в котелке МК под картушкой и вместе с котелком ориентируется требуемым образом относительно диаметральной плоскости судна.
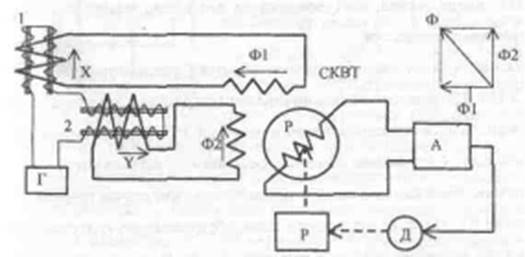 Если используется двухзондовый ИД, то ось чувствительности
одного зонда устанавливается вдоль диаметральной плоскости, а другого
перпендикулярно ей. В этом случае зонд 1 будет измерять продольную составляющую
Х поля картушки, а зонд 2 - поперечную У. Сигнальные обмотки зондов связаны со
статорными обмотками синусно-косинусного вращающегося трансформатора (СКВТ).
Получая от зондов напряжение, пропорциональное указанным компонентам
магнитного поля картушки, эти обмотки создают внутри СКВТ ортогональные
магнитные потоки Ф1 и Ф2, образующие в сумме магнитный поток, ориентация вектора
Ф которого внутри статора определяется положением картушки относительно диаметральной
плоскости судна. Магнитный поток Ф индуктирует в обмотках ротора СКВТ напряжения,
которые будут зависеть как от величины потока, так и направления вектора Ф
относительно плоскости роторных обмоток. Если плоскость обмотки ротора параллельна
вектору Ф, то ЭДС, индуктированная в ней, при любом значении его модуля будет
равна нулю. Таким образом, устанавливая ротор СКВТ в такое положение, когда на
одной из его обмоток сигнал постоянно будет равен нулю, мы будем отслеживать
изменение ориентации картушки относительно диаметральной плоскости судна.
Если используется двухзондовый ИД, то ось чувствительности
одного зонда устанавливается вдоль диаметральной плоскости, а другого
перпендикулярно ей. В этом случае зонд 1 будет измерять продольную составляющую
Х поля картушки, а зонд 2 - поперечную У. Сигнальные обмотки зондов связаны со
статорными обмотками синусно-косинусного вращающегося трансформатора (СКВТ).
Получая от зондов напряжение, пропорциональное указанным компонентам
магнитного поля картушки, эти обмотки создают внутри СКВТ ортогональные
магнитные потоки Ф1 и Ф2, образующие в сумме магнитный поток, ориентация вектора
Ф которого внутри статора определяется положением картушки относительно диаметральной
плоскости судна. Магнитный поток Ф индуктирует в обмотках ротора СКВТ напряжения,
которые будут зависеть как от величины потока, так и направления вектора Ф
относительно плоскости роторных обмоток. Если плоскость обмотки ротора параллельна
вектору Ф, то ЭДС, индуктированная в ней, при любом значении его модуля будет
равна нулю. Таким образом, устанавливая ротор СКВТ в такое положение, когда на
одной из его обмоток сигнал постоянно будет равен нулю, мы будем отслеживать
изменение ориентации картушки относительно диаметральной плоскости судна.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.