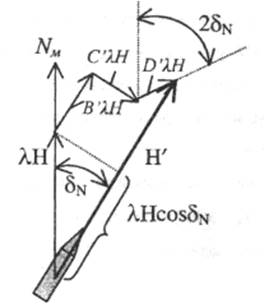
 Как следует из рисунка:
Как следует из рисунка:
HN = lH cosdN + DlHcosdN + BlH
HS = lH cosdS + DlHcosdS - BlH
Совместное использование указанных равенств позволяет отделить силы порождающие интересующую нас полукруговую девиацию, от сил ее не порождающих. Действительно, если вычислить среднее значение 0,5(HN + HS) напряженностей магнитного поля, измеренных на противоположных курсах судна, то это значение не будет зависеть от CMC BlH:
Нср = 0,5(HN + HS) = (lH + DlH)cosd
Следовательно, значение силы BlH будет определяться разностью между HN или HS и Нср.
Напряженность судового магнитного поля измеряется с помощью дефлектора, путем компенсации измеряемого поля полем его магнитов. Принимая во внимание сказанное, становится очевидной методика устранения полукруговой девиации. Действительно, зная величину Нср и выставив ее значение на дефлекторе, установленном на пеленгаторе компаса, мы с его помощью компенсируем указанную составляющую судового магнитного поля на одном из рассматриваемых курсов (N или S). В этих условиях на картушку будет действовать только сила BlH, которая осталась не скомпенсированной Названная сила устраняется с помощью продольных постоянных магнитов, расположенных в нактоузе МК.
Уничтожение CMC СlH производится аналогично рассмотренному на курсах 90° и 270°.
2.3. Анализ работы следящей системы.
|
МК |
0,0° |
30,0° |
60,0° |
90,0° |
120,0° |
150,0° |
180,0° |
210,0° |
240,0° |
270,0° |
300,0° |
330,0° |
360,0° |
|
КК |
0,0° |
30,1° |
60,0° |
89,6° |
119,7° |
150,1° |
179,6° |
209,8° |
240,3° |
269,1° |
299,8° |
330,1° |
360,0° |
|
К |
0,3° |
30,2° |
60,3° |
90,4° |
120,4° |
149,8° |
179,6° |
209,7° |
240,3° |
270,6° |
299,8° |
330,2° |
360,0° |
Девиация находится по следующей формуле. d = МК – КК, погрешность работы дистанционной следящей системы находится как разница между КК и К Вычисления приведем в таблице:
|
d |
0,0° |
-0,1° |
0,0° |
0,4° |
0,3° |
-0,1° |
0,4° |
0,2° |
-0,3° |
0,9° |
0,2° |
-0,1° |
0,0° |
|
Dd |
-0,3° |
-0,2° |
-0,3° |
-0,4° |
-0,4° |
0,2° |
0,4° |
0,3° |
-0,3° |
-0,6° |
0,2° |
-0,2° |
0,0° |
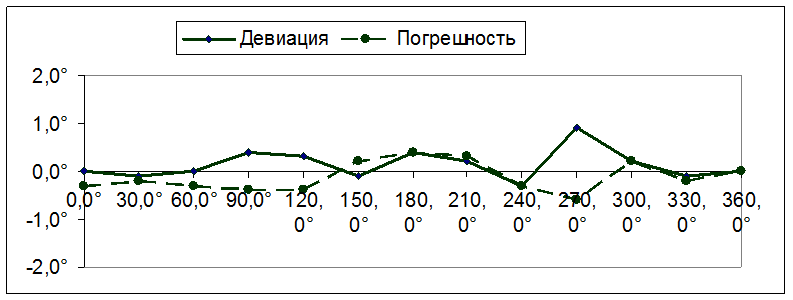
На основе данных таблиц, построим график зависимости Девиации и Погрешности работы дистанционной следящей системы от МК
Из графика видно, что компас имеет неравномерное распределение погрешностей по всему диапазону картушки.
3.  РАБОТЫ, ВЫПОЛНЯЕМЫЕ В
РЕЙСЕ В СЛУЧАЕ ОТКАЗА ГИРОКОМПАСА
РАБОТЫ, ВЫПОЛНЯЕМЫЕ В
РЕЙСЕ В СЛУЧАЕ ОТКАЗА ГИРОКОМПАСА
3.1. Оценка необходимой точности положения судна при пеленговании.
Во многих
случаях постоянная девиация ![]() имеет
малую величину, поэтому МП достаточно вычислить по приближенной формуле. Если
же коэффициент
имеет
малую величину, поэтому МП достаточно вычислить по приближенной формуле. Если
же коэффициент ![]() велик,
то его необходимо принимать во внимание, выбрав величину А из предыдущей
таблицы остаточной девиации.
велик,
то его необходимо принимать во внимание, выбрав величину А из предыдущей
таблицы остаточной девиации.
Поступая
таким образом, следует иметь в виду, что коэффициент ![]() включает
в себя собственно постоянную девиацию и инструментальную ошибку — в основном
погрешность установки призмы пеленгатора. Последняя у разных экземпляров
пеленгаторов имеет различную величину и иногда достигает больших значений.
Поэтому, чтобы получить величину магнитного пеленга (с учетом коэффициента
включает
в себя собственно постоянную девиацию и инструментальную ошибку — в основном
погрешность установки призмы пеленгатора. Последняя у разных экземпляров
пеленгаторов имеет различную величину и иногда достигает больших значений.
Поэтому, чтобы получить величину магнитного пеленга (с учетом коэффициента ![]() ), необходимо производить наблюдения тем
пеленгатором, который использовался при определении пеленгов для составления
последней таблицы остаточной девиации.
), необходимо производить наблюдения тем
пеленгатором, который использовался при определении пеленгов для составления
последней таблицы остаточной девиации.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.