










Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Саратовский государственный технический университет
Балаковский институт техники, технологии и управления
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК НЕЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания к выполнению курсовой работы
по дисциплине «Теория автоматического управления»
для студентов специальности 210100 всех форм обучения
Одобрено
редакционно-издательским советом
Балаковского института техники,
технологии и управления
Балаково 2007
В производственном процессе человеку часто приходится выполнять однообразные операции (завинчивание гаек на конвейере, штамповка деталей на прессе…). В некоторых случаях человек находится под воздействием вредных факторов (в области СВЧ-излучений при работе с реактором, в зонах химических загрязнений…). Во всех перечисленных случаях целесообразно человека исключить из процесса управления, а само управление автоматизировать.
Автоматизация – комплекс технических мероприятий, обеспечивающих частичное или полное исключение человека.
Управление каким-либо объектом –это процесс воздействия на него с целью обеспечения требуемого течения процесса в объекте или требуемого изменения его состояния.
Основой управления является получение и обработка информации о состоянии и внешних условиях его работы для определения воздействий, которые необходимо приложить к объекту, чтобы обеспечить достижение цели управления.
Цель управления – достижение состояния системы автоматического управления, которое соответствует моменту, когда отсутствует обмен информационной энергией между объектом управления и устройством управления при наличии связи между ними. Взаимодействие устройства управления и объекта управления осуществляется в соответствии с избранным алгоритмом управления. Под алгоритмом управления понимают совокупность правил, предписаний, в соответствии с которыми устройство управления вырабатывает сигналы управления для объекта управления с целью достижения цели управления. Таким образом, из объекта управления (ОУ) и устройства управления (УУ) образуется система автоматического управления (САУ).
Основной целью выполнения курсовой работы является закрепление на практике знаний, полученных студентом при изучении курса ,,Теория управления”, развитие навыков математического анализа систем управления на конкретных примерах и задачах. Полученные навыки должны стать этапом подготовки к самостоятельной разработке курсовых проектов по дисциплинам ,,Локальные системы автоматики”; ,,Методы оптимизации систем управления “.
В процессе выполнения курсовой работы студент должен продемонстрировать способность самостоятельно выполнять типовые задачи анализа и синтеза систем управления, применять различные критерии устойчивости систем, определять показатели качества управления, выполнять эквивалентные преобразования структурных схем.
Одна из основных задач теории автоматического управления - это определение устойчивости системы.
Под устойчивостью понимают способность системы самостоятельно возвращаться в состояние равновесия после вывода ее из этого состояния и снятия всех возмущающих воздействий.
Показатели качества САУ:
1. Полоса пропускания сигнала ![]() - диапазон частот,
в пределах которых амплитудно-частотная характеристика (АЧХ) больше или равна
единице. Если АЧХ на всем диапазоне частот меньше единицы, то полоса пропускания
отсчитывается по управлению 0.707А(0), где А(0) – значение амплитуды при
- диапазон частот,
в пределах которых амплитудно-частотная характеристика (АЧХ) больше или равна
единице. Если АЧХ на всем диапазоне частот меньше единицы, то полоса пропускания
отсчитывается по управлению 0.707А(0), где А(0) – значение амплитуды при ![]() =0.
=0.
Полоса
пропускания сигнала ![]() характеризует диапазон, в пределах
которого система пропускает входной сигнал без существенных искажений.
характеризует диапазон, в пределах
которого система пропускает входной сигнал без существенных искажений.
2. Резонансная частота ![]() - частота, соответствующая максимальному
значению АЧХ. Она определяет период колебаний регулируемо параметра при
переходном процессе:
- частота, соответствующая максимальному
значению АЧХ. Она определяет период колебаний регулируемо параметра при
переходном процессе:  .
.
3. Показатель колебательности ![]() - определяется отношением
- определяется отношением ![]() к
к ![]() :
:
 .
.
4. Частота
среза ![]() - частота, после которой АЧХ становится
меньше 0.1А(
- частота, после которой АЧХ становится
меньше 0.1А(![]() ) и ее влияниям на качество
переходного процесса можно пренебречь. По значению
) и ее влияниям на качество
переходного процесса можно пренебречь. По значению ![]() можно
ориентировочно определить время регулирования
можно
ориентировочно определить время регулирования  .
.
Анализ устойчивости нелинейных систем выполняется по фазовому портрету.
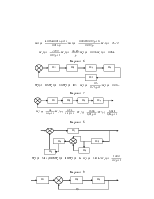
САУ называется нелинейной, если хотя бы одно звено системы описывается нелинейным уравнением (обладает нелинейной характеристикой), рис. 1.
u u-x x1 x
 |
x
Рис. 1. Структурная схема нелинейной системы:
![]() -
передаточная
функция линейной части системы;
-
передаточная
функция линейной части системы;
![]() - статическая характеристика
нелинейной части системы
- статическая характеристика
нелинейной части системы
В нелинейных САУ различают статические и динамические нелинейности. Статические нелинейности - это нелинейности статических характеристик. Динамические нелинейности - нелинейности дифференциального уравнения динамики звена. Если рассмотреть апериодическое звено:
то
постоянная времени ![]() является нелинейной
функцией входного сигнала.
является нелинейной
функцией входного сигнала.
Оптимизация САУ в большинстве случаев связана с введением специальных нелинейностей в контур управления.
Рассмотрим нелинейное звено.
|
Рис. 2. Структурная схема нелинейного звена
Его статические характеристики могут быть непрерывными, как, например, характеристики с насыщением (рис. 3) и релейными, то есть имеющим точки разрыва (рис. 4).
|
а) реальная б) идеальная
Рис. 3. Статические характеристики с зоной насыщения
|
|
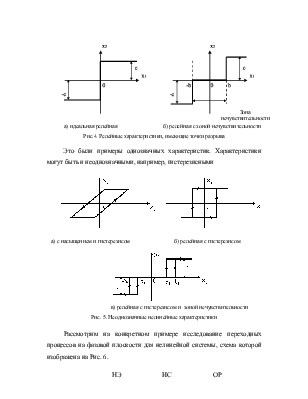
Рис.4. Релейные характеристики, имеющие точки разрыва
Это были примеры однозначных характеристик. Характеристики могут быть и неоднозначными, например, гистерезисными
а) с насыщением и гистерезисом б) релейная с гистерезисом
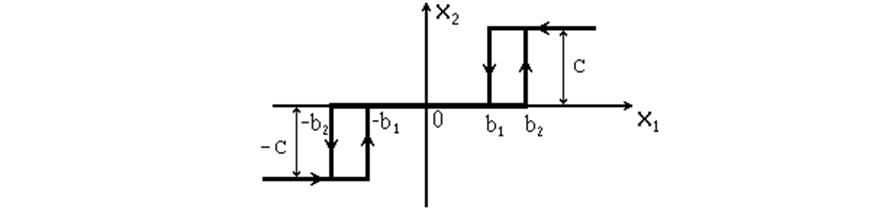
в) релейная с гистерезисом и зоной нечувствительности
Рис. 5. Неоднозначные нелинейные характеристики
|
|
|
 Рис. 6. Структурная схема системы с нелинейным
элементом
Рис. 6. Структурная схема системы с нелинейным
элементом
НЭ – нелинейный элемент; ИС - исполнительное устройство; ОР- объект регулирования
Пусть нелинейный элемент представляет собой чувствительный элемент со статической характеристикой в виде релейной характеристики с зоной нечувствительности (рис. 5б).
Исполнительное устройство (рис. 6) имеет передаточную функцию вида:
 .
.
Передаточная функция объекта регулирования равна:
 .
.
Заметим,
что ![]() .
.
Тогда линейная часть системы будет описываться уравнением:
 .
.
Уравнение
нелинейного элемента: ![]() .
.
Уравнение
сравнивающего элемента: ![]() .
.
Предположим,
что задающее воздействие ![]() . Тогда уравнение
нелинейной САУ будет иметь следующий вид:
. Тогда уравнение
нелинейной САУ будет иметь следующий вид:
 .
.
Характеристика нелинейного элемента разбивается на три линейных участка и для каждого из них составляется линейное дифференциальное уравнение
I
уч.  , если
, если ![]() ,
,
II
уч.  если
если ![]() ,
,
III
уч.  , если
, если ![]() .
.
Для
фазовой плоскости введем обычные координаты ![]() и
и . Исключим в дифференциальных уравнениях
время, тогда можем записать:
. Исключим в дифференциальных уравнениях
время, тогда можем записать:
Разделяя переменные и интегрируя, получают уравнения фазовых траекторий для участков 1-3 нелинейной характеристики.
I
уч. ![]() ,
,
II
уч. 
III
уч. ![]() ,
,
где
![]() - постоянные интегрирования,
определяемые начальными условиями.
- постоянные интегрирования,
определяемые начальными условиями.
Сначала на фазовой плоскости наносят линии переключения, разделяющие плоскость на три области. Это линии перехода от одного участка нелинейной характеристики к другому.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.