Лабораторная работа № 5
Коррекция нелинейных систем
Цель работы: исследовать возможность устранения режимов автоколебаний в нелинейных системах.
Общие положения
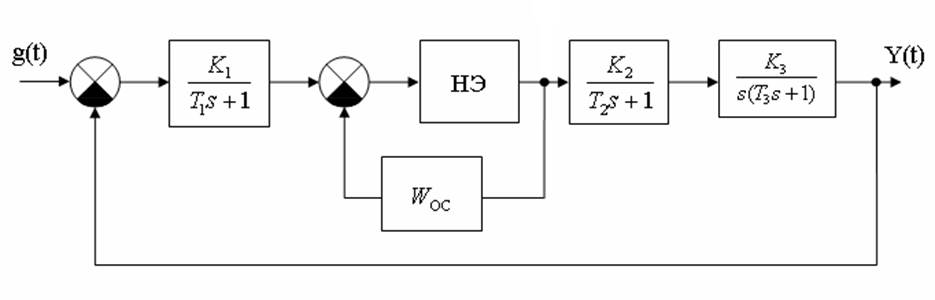
Для устранения режима автоколебаний или существенного уменьшения их амплитуды в нелинейную систему чаще всего вводят КУ обратной связи, при последовательной коррекции используют нелинейные КУ. Коррекция даже с помощью жесткой обратной связи, охватывающей НЭ, позволяет достичь большего эффекта, чем последовательная коррекция. Поэтому в большинстве САУ вводят ОС по положению регулирующего органа (угла поворота исполнительного механизма) т.к. именно в этом блоке присутствуют нелинейности.
Сложнее всего устранить режим автоколебаний в системе при гистерезисной нелинейности (с зоной неоднозначности). Для этого вводя инерционные гибкие обратные связи, параметры которых либо рассчитывают, либо подбирают при моделировании системы.
Порядок выполнения лабораторной работы
 1. Собрать
схему в программе VisSim:
1. Собрать
схему в программе VisSim:
Рисунок 5.1 – Схема моделирования
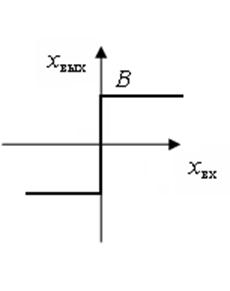
НЭ:
а)
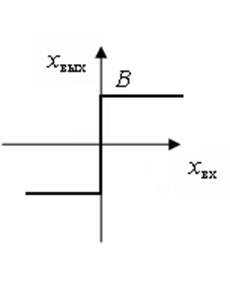
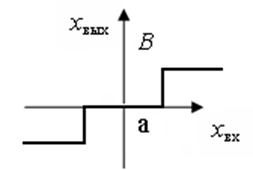
Рисунок 5.2 – Исследуемые нелинейные элементы
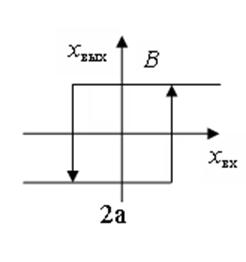
a=2
Зона нечувствительности 4
2. Исследовать работу системы без КУ при ![]() .
.
3. Исследовать влияние КУ на поведение системы:
1) Wос(s)=Кос;
2) Wос(s)=Кос\(TосS+1).
Кос=1; Тос=Т2.
4. Исследовать влияние Кос и Тос на режим автоколебаний и его устранение. Wос(s)=Кос и Wос(s)=Кос\(TосS+1).
![]() ;
; 
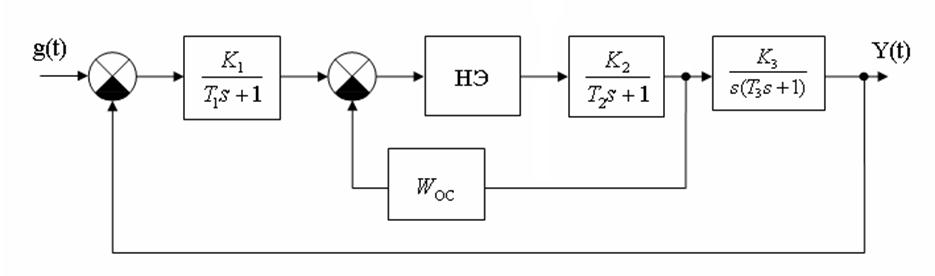
Рисунок 5.3 – Схема моделирования
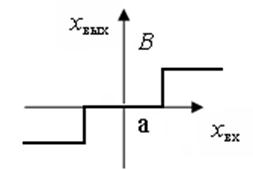
 НЭ:
НЭ:
а)
Рисунок 5.4 – Исследуемые нелинейные элементы
а=1
а=2
Зона нечувствительности 4
5. Исследовать вынужденное движение g(t)=5*1(t)
Wос(s)=Кос\(TосS+1) и Wос(s)=S*Кос\(TосS+1).
6. Выбрать оптимальные КУ и их параметры.
Содержание отчёта.
1. Схемы исследования.
2. Результаты исследования – указать на графиках ![]() ,
, ![]() и
их значения.
и
их значения.
3. Построить зависимости ![]() (
(![]() ) и
) и ![]() (
(![]() ), найти
), найти ![]() и
и
![]() , которые устраняют режим
автоколебаний.
, которые устраняют режим
автоколебаний.
4. Рекомендации по коррекции нелинейных систем.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.