БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
КАФЕДРА УПРАВЛЕНИЯ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
КУРСОВАЯ РАБОТА
по дисциплине
Теория автоматического управления
на тему
Исследование устойчивости линейных и нелинейных систем
автоматического управления
Пояснительная записка
Выполнил ст. гр. УИТ-42:
Кочетовский А. А.
Принял:
Мартынова И.В.
«_____» ___________2005
2005
СОДЕРЖАНИЕ
Введение 3
1 Постановка задачи разработки СУ 4
2 Разработка структурной схемы САР и выбор передаточных функций 6
2.1 Выбор передаточных функций объекта управления 6
3 Расчет характеристик линейной САР 8
5 Анализ системы с учетом нелинейного элемента 14
Заключение 18
Список использованной литературы 18
ВВЕДЕНИЕ
Построение систем автоматического управления требует создания качественных регуляторов. Данная задача является первостепенной в любой САУ. Построение качественного регулятора требует создание такой системы, которая была бы устойчивой при некотором изменении внешних факторов и внутренних процессов.
В выполняемой курсовой работе предлагается исследовать линейную и нелинейную систему и ознакомится с влиянием нелинейных узлов на работу регулятора.
В ходе контрольной работы будет проведено упрощение системы, определена ее устойчивость и найдены основные характеристики качества управления. Данные операции будут проделаны для линейной и нелинейной САУ. Будет показано, как влияет введение в регулятор нелинейных узлов, и определен положительный (отрицательный фактор) данных узлов в системе. В ходе выполнения курсовой работы будет построен фазовый портрет, который является отражением работы нелинейной системы
1 ПОСТАНОВКА ЗАДАЧИ РАЗРАБОТКИ СИСТЕМЫ УПРАВЛЕНИЯ
Следящий гидропривод с объемный регулированием, имеющий механическое управление, снабжается устройством, в котором сравнивается входной сигнал, задаваемый оператором, и сигнал поступающий с обратной связи, который пропорционален углу поворота вала гидроматора или перемещение штока гидроцилиндра. Выявленная при этом ошибка должна быть пропорциональна изменению угла j наклона блока цилиндра насоса. Если исполнительный гидродвигателем является гидромотор, то элементом сравнения входного сигнала и сигнала обратной связи может служить механический дифференциал. В этом случае при повороте ручки управления на угол Q на этот же угол повернется и соединенная с ней шестерня 1 дифференциала. Шестерня 2, обегая шестерню 8, поворачивает вал, на котором они вращаются. Вместе с валом вращается винт 3, по которому при этом перемещается гайка 4, соединенная с блоком цилиндра или с шайбой насоса. Вследствие отклонения блока цилиндра (шайбы) от нейтрального положения жидкость из насоса 5 поступает в гидромотор 6, приводя во вращение вал последнего. От вала гидромотора через зубчатую передачу 7 приводится о вращение шестерня 8 дифференциала. При вращение этой шестерни винт 3 возвращает гайку 4 вместе с блоком цилиндра в нейтральное положение после чего вал гидродвигатель останавливается.
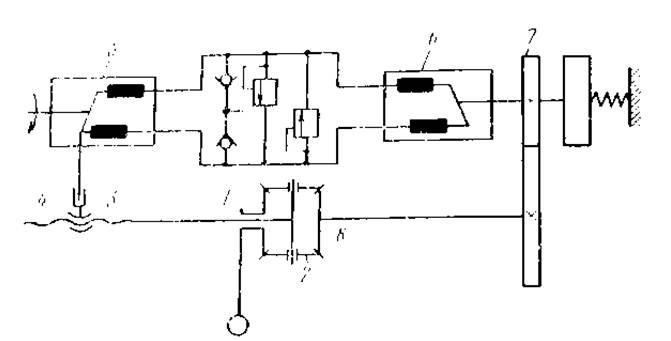
рисунок 1 –принципиальная схема гидропривода
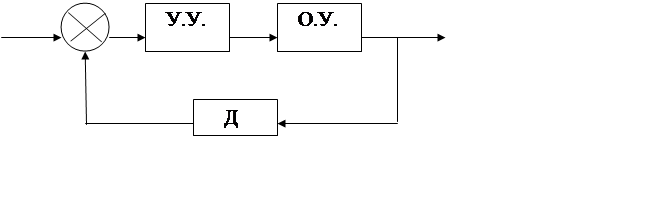
Составим функциональную схему гидропривода с механическим управлением, выделив при этом основные блоки, систем при этом примет вид рисунке 2.
 X(t)
U(t) Y(t)
X(t)
U(t) Y(t)
Рисунок 2 –функциональная схема гидропривода
Опишем, какими механическими устройствами представлены основные звенья функциональной схемы гидропривода:
У.У.- насос гидропривода
О.У. – гидромотор
Д. – дифференциал.
Определим входные и выходные сигналы функциональных элементов системы автоматического управления.
X(t) – входным сигналом системы является угол поворота ручки управления (т.е оператор системы задает угол, на который должен повернуться вал гидромотора ). Этот сигнал поступает на У.У. и определяет какое количество жидкости должен перегнать насос в цилиндры гидромотора, из этого делаем вывод, что U(t) – количество воды выпущенное из насоса. Вода приводит во вращение вал гидромотора и следовательно Y(t) – ,выходной сигнал системы, получается угол поворота вала двигателя. На вход датчика поступает сигнал угла поворота вала гидромотора, который сравнивается с входным сигналом (углом поворота ручки управления). Сигнал с датчика, так же являющийся угловой мерой, поступает на вход насоса. На этом один круг регулирования системы гидропривода с механическим управлением заканчивается.
2 РАЗРАБОТКА СТРУКТУРЫ СИСТЕМЫ
Воспользуемся структурной схемой гидропривода с механическим управлением из справочника Попова.
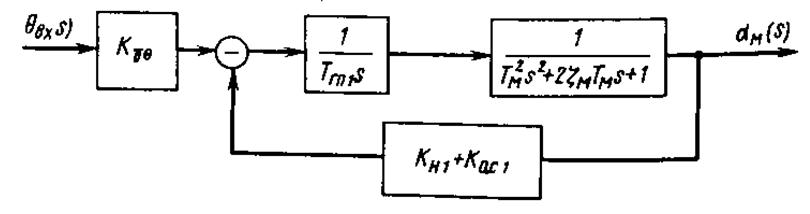
Структурная схема этой системы изображена на рисунке 3.
![]()
рисунок 3 –структурная схема гидропривода
где КnQ-коэффициент передачи от ручки управления до блоков цилиндров насоса.
К о. с.1- коэффициент передачи обратной связи от вала гидроцилиндра до блоков цилиндров насоса.
Кн1 – коэффициент передачи дифференциала (из условия системы он обычно значительно меньше коэффициента Кос1 и при рассмотрении устойчивости системы может не учитываться)
![]() - передаточная функция насоса
- передаточная функция насоса
 -
передаточная функция гидромотора
-
передаточная функция гидромотора
2.1 Выбор передаточных функций элементов системы
Выбор коэффициентов звеньев структурной схемы ведем исходя из того, что система гидропривода с механическим регулированием должна быть устойчива.
· Выбор передаточной функции объекта управления.
 |
· Выберем передаточную функцию устройства управления
 |
· Выбор передаточной функции обратной связи
·
3 РАСЧЕТ ХАРАКТЕРИСТИК СИСТЕМЫ
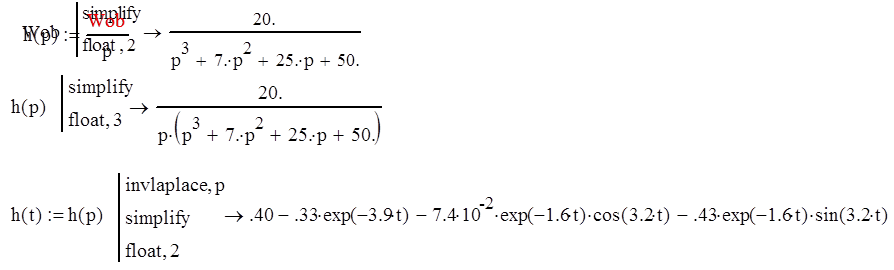
В структурную схему входят типовые динамические звенья, поэтому расчет устойчивости и качества регулирования нетрудно провести по переходным, амплитудно-частотным и логарифмическим характеристикам. Произведем расчет устойчивости системы гидропривода. Для этого произведем вычисление общей передаточной функции системы (см. рисунок 3). Выражение будет иметь вид:
 |
 |
·
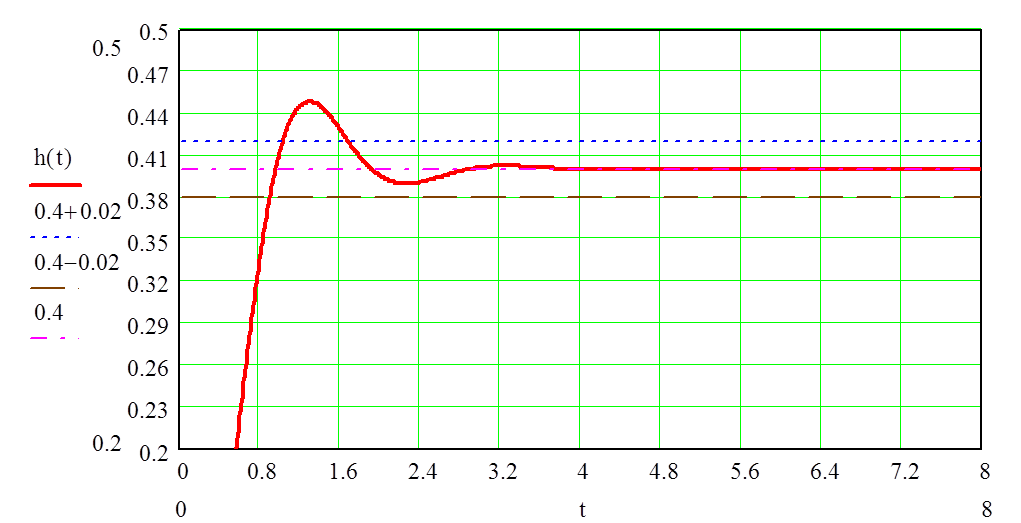
Построим график переходного процесса системы:
Рисунок 4 –график переходного процесса
Из графика переходного процесса определим прямые показатели качества регулирования САР:
По графику определяем значения 10% трубки, откладывая вверх и вниз по 5% от установившегося значения.
Определим по графику прямые показатели качества:
1. Время регулирования t=2,2
2. Время нарастания t=1,4
3. Время первого согласования t=1,1
4. Число колебаний регулируемой величины n=0
5. Перерегулирование

6. Установившееся значение регулируемой величины h=0.4
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




