![]()
![]() 1.1. Заданная структурная схема
автоматической системы с значениями параметров.
1.1. Заданная структурная схема
автоматической системы с значениями параметров.
 g x f1 f2 y
g x f1 f2 y
(-)
Параметры:
|
|
2.75 |
|
|
2.5 |
|
|
1.6 |
|
|
0.045 |
|
|
0.1 |
1.2. Изложение процесса исследования заданной автоматической системы на устойчивость и результаты исследования.
Передаточная функция замкнутой автоматической системы имеет вид

для нашей системы примет следующий вид

Используя замену
![]()
![]()
![]()
![]()
получим

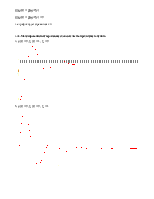
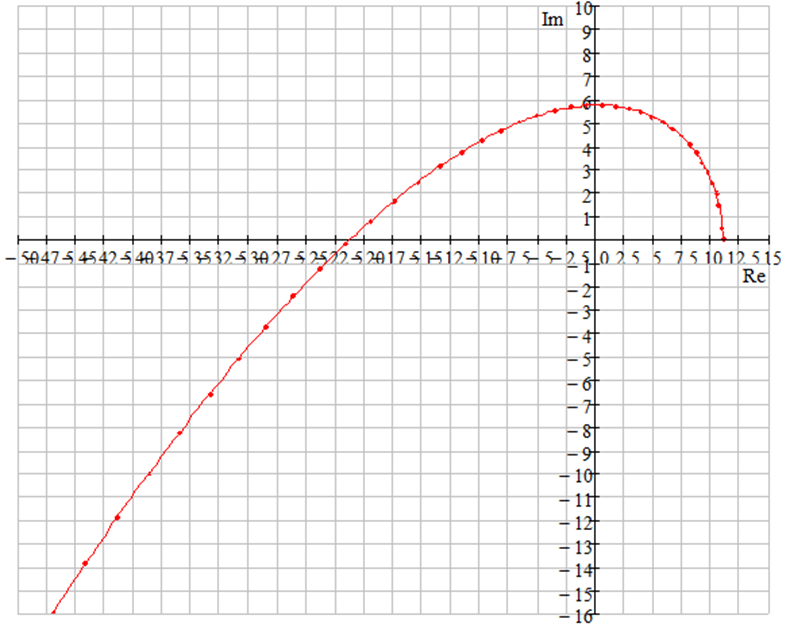
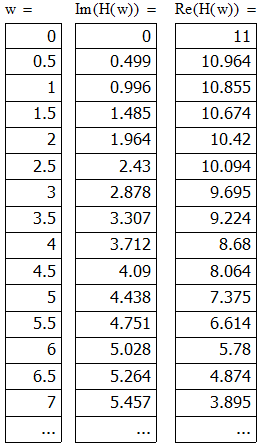
Исследуем систему на устойчивость с помощью критерия Михайлова
![]()
![]()
![]()
![]()
![]()
 Получим
следующий график:
Получим
следующий график:
![]()
![]()
![]()
![]()
![]()
![]()
Видим что критерий Михайлова выполняется(кривая последовательно проходит 3 квадранта против часовой стрелки), а значит система устойчива.
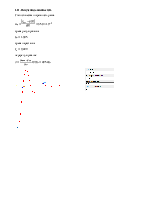
1.3. Проверка выполнения принципа суперпозиции в заданной автоматической системе.
График
для ![]()
График
для ![]()
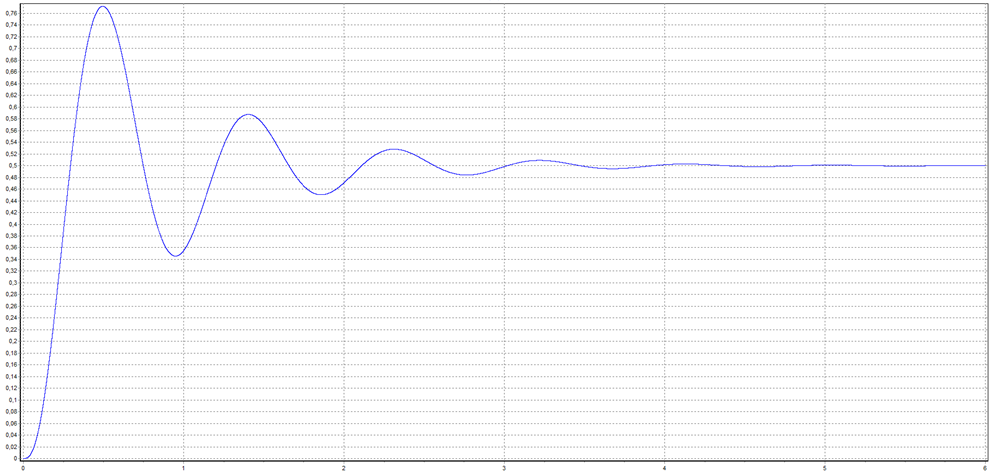
Из
построенных выше графиков видим, что при изменении ![]() с
1 на 0.5, значение коэффициента на графике изменилось в 2 раза, отсюда следует,
что принцип суперпозиции выполняется.
с
1 на 0.5, значение коэффициента на графике изменилось в 2 раза, отсюда следует,
что принцип суперпозиции выполняется.
1.4. Вычисление значения интегральной оценки качества аналитическим способом.



![]()



Интегральная оценка полученная при моделировании равна 1.55425, с долей погрешности равна оценке полученной аналитически.
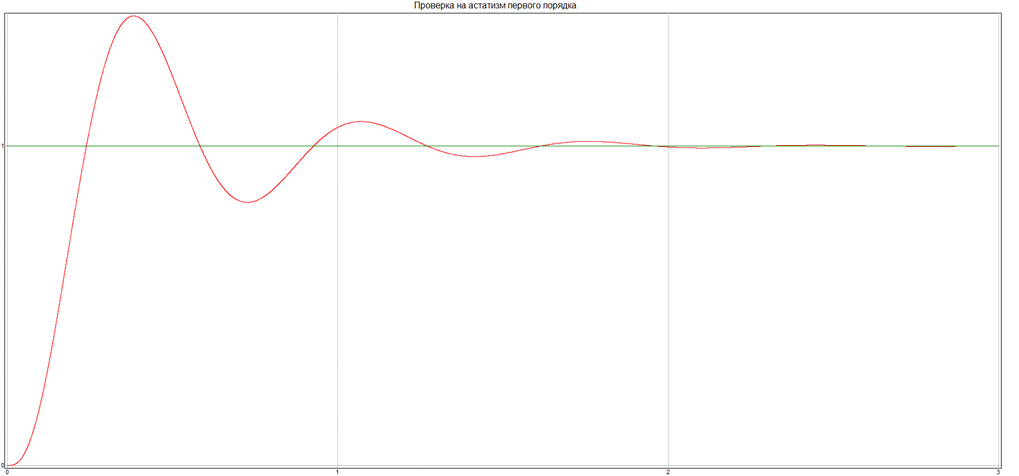
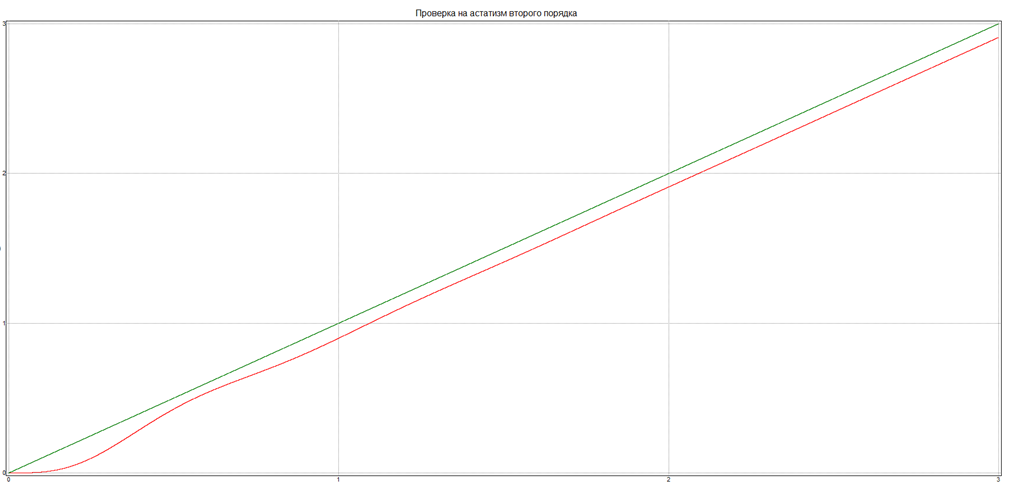
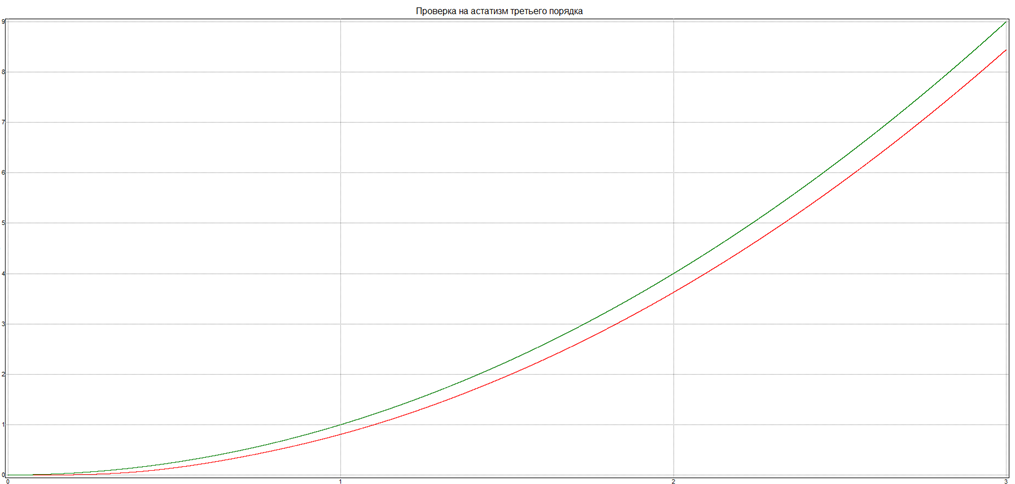
1.5. Доказательство того, что система обладает астатизмом первого порядка, но не обладает астатизмом второго и третьего порядков.

Разложение по ошибке в ряд по возрастанию степени р.

ряд
сходится при ![]() перейдем в область оригиналов
перейдем в область оригиналов

![]() коэффициенты
ошибок определяются по правилу разложения в ряд Тейлора.
коэффициенты
ошибок определяются по правилу разложения в ряд Тейлора.
![]()
От коэффициентов зависит, обладает система астатизмом или нет
![]() астатизм
первого порядка
астатизм
первого порядка

Т.к. система не обладает астатизмом второго порядка, значит не обладает и астатизмом третьего порядка.
1.6.
Изложение процесса вычисления ошибки ![]() и
её значение при
и
её значение при ![]() и
и
![]() .
.
при ![]() :
:
![]()
при ![]() :
:

1.7.
Доказательство того, что при ![]() ошибка
ошибка
![]() .
.

при ![]() :
:
![]()
Видим,
что при коэффициенте ![]() стоит
стоит
![]() ,
значит ошибка зависит от времени.
,
значит ошибка зависит от времени.
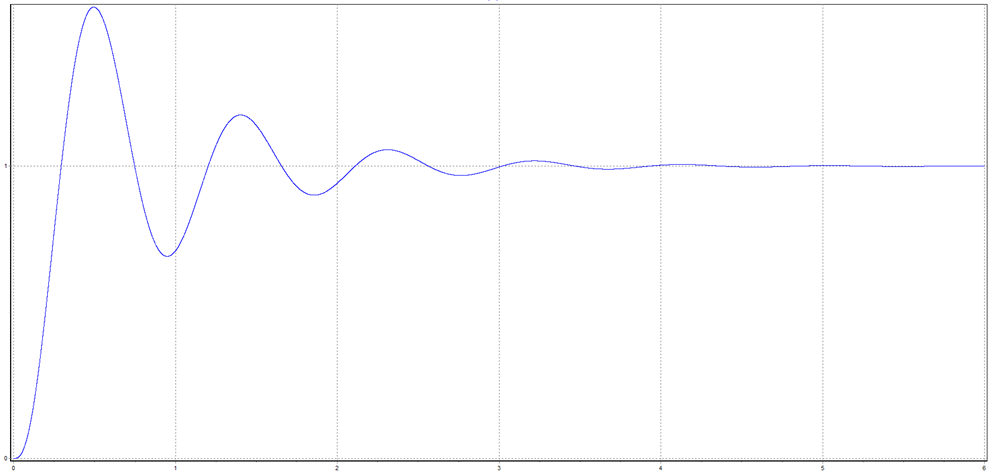
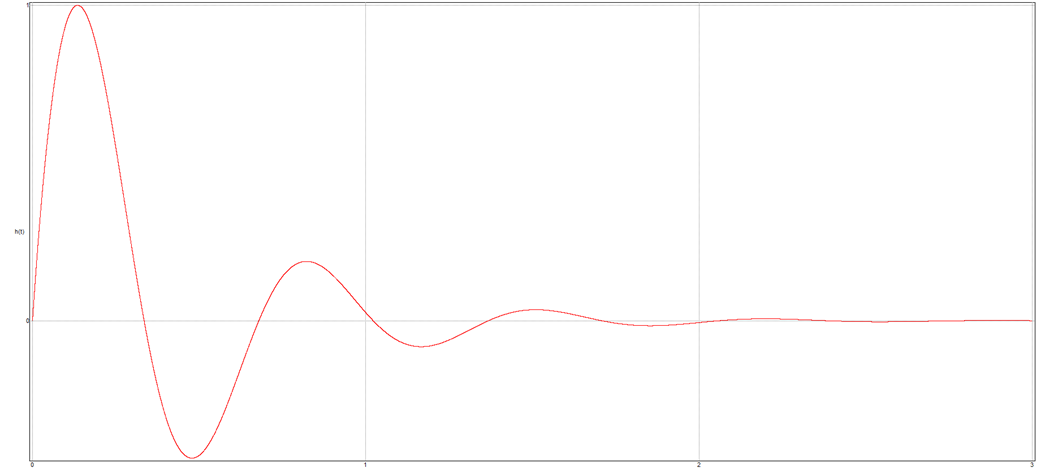
1.8. Результаты моделирования автоматической системы
 Воздействие
Воздействие
![]()
 Воздействие
Воздействие
![]()
 Воздействие
Воздействие
![]()
1.9. Доказательство того, что в заданной автоматической системе характер переходного процесса зависит от точки приложения входного воздействия.
|
|
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() y(t)
y(t)
|

Воспользуемся преобразованием Лапласа

Из теоремы о предельном переходе следует
![]()
т.е.
график будет стремиться к этому значению (![]() ).
).
|
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() y(t)
y(t)
![]() (-)
(-)
 |

Воспользуемся преобразованием Лапласа

Из теоремы о предельном переходе следует
![]()
![]()
т.е. график будет стремиться к 0.
1.10. Моделирование подтверждающее доказательства предыдущего пункта.
1) ![]()
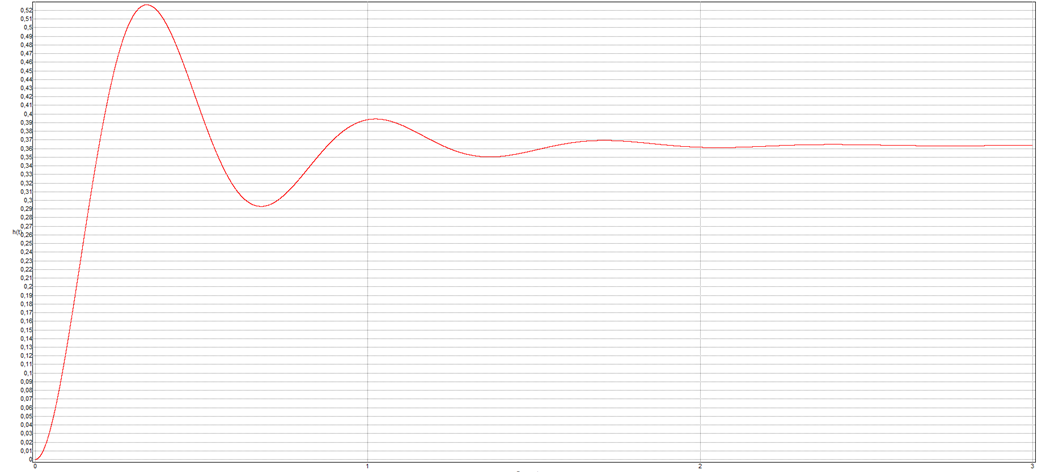
2) ![]()
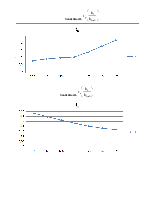
1.11. Получение зависимостей.
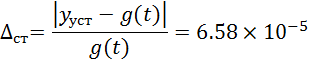
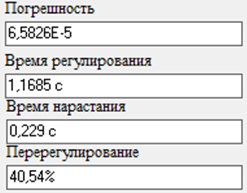
Статистическая погрешность равна
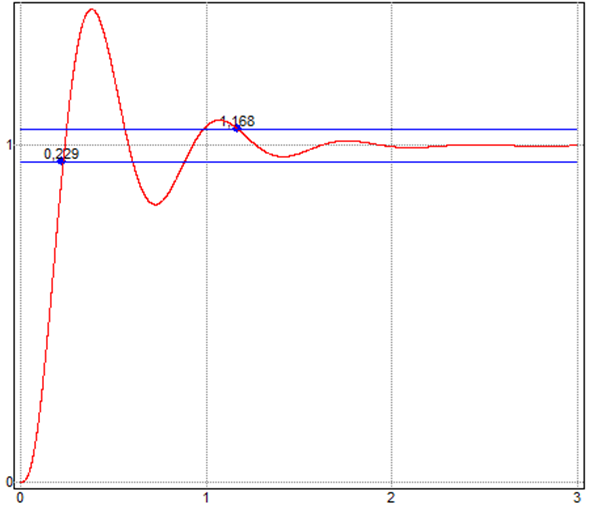
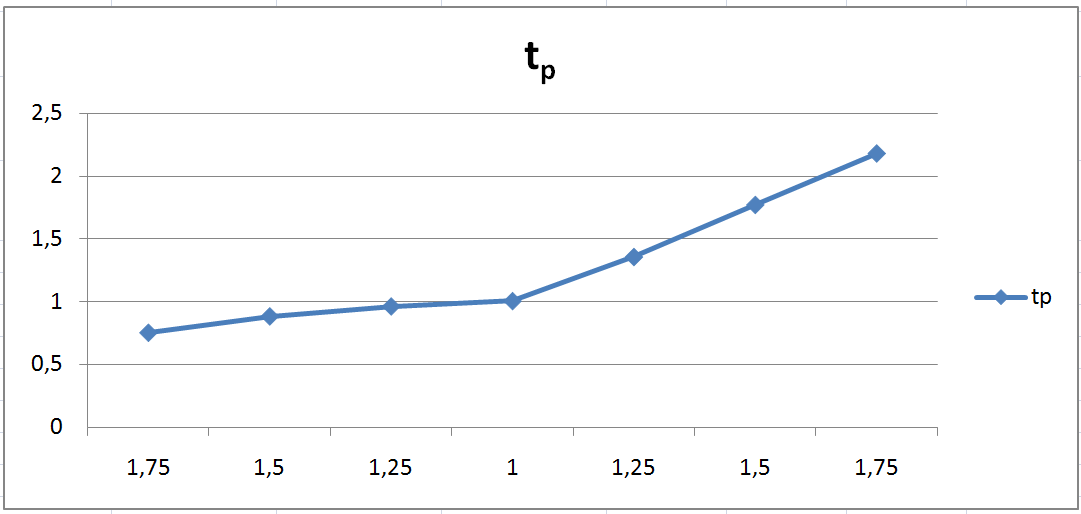
время регулирования
![]()
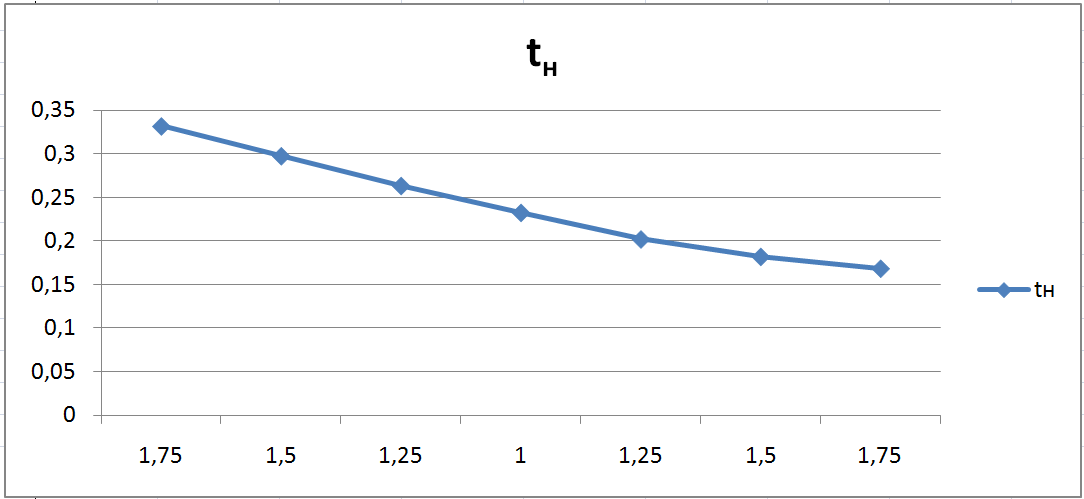
время нарастания
![]()
перерегулирование

Зависимость 
Зависимость
Зависимость
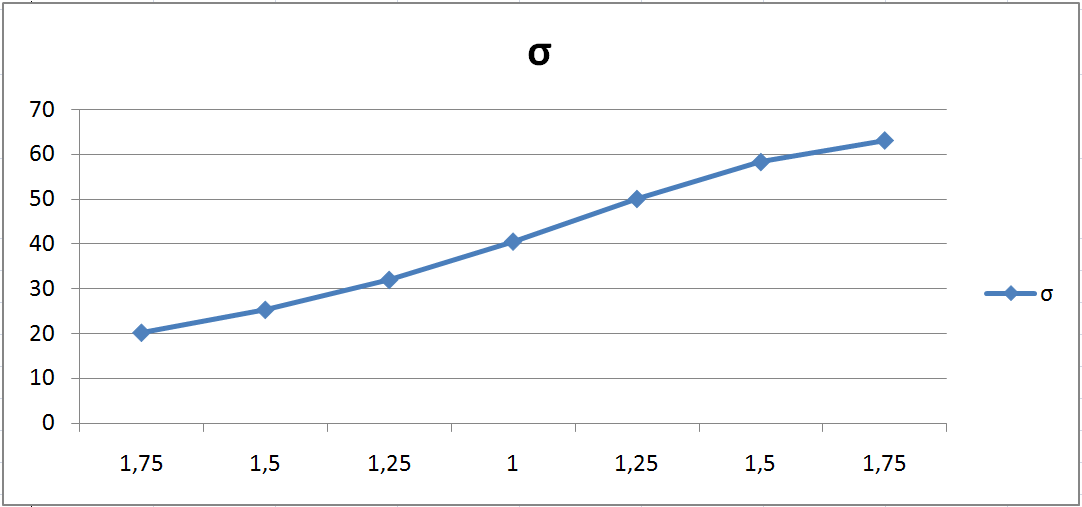
Зависимость
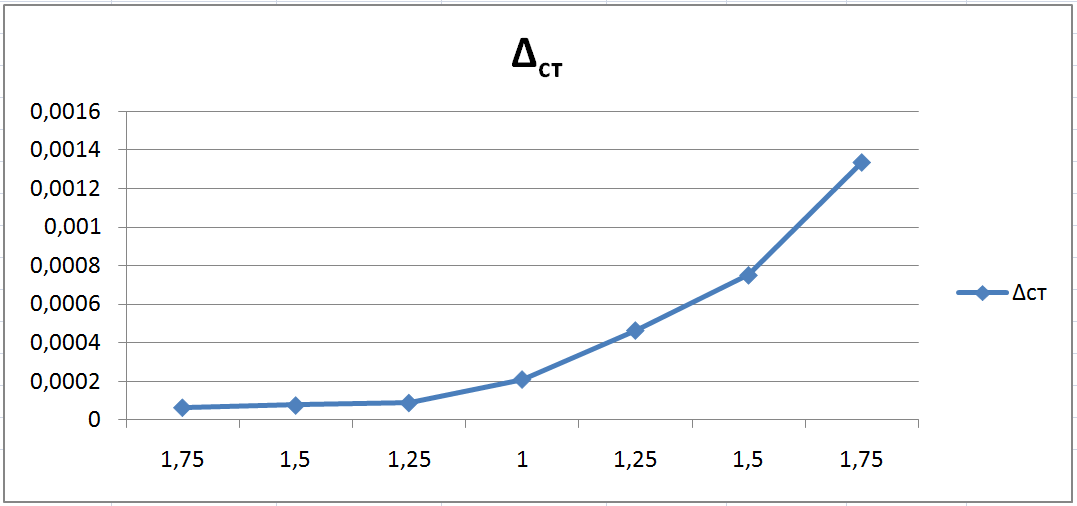
При увеличении k1 увеличивается tp , s, Δст , а tн – уменьшается.
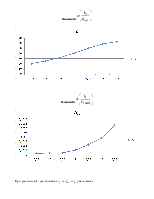
Зависимость
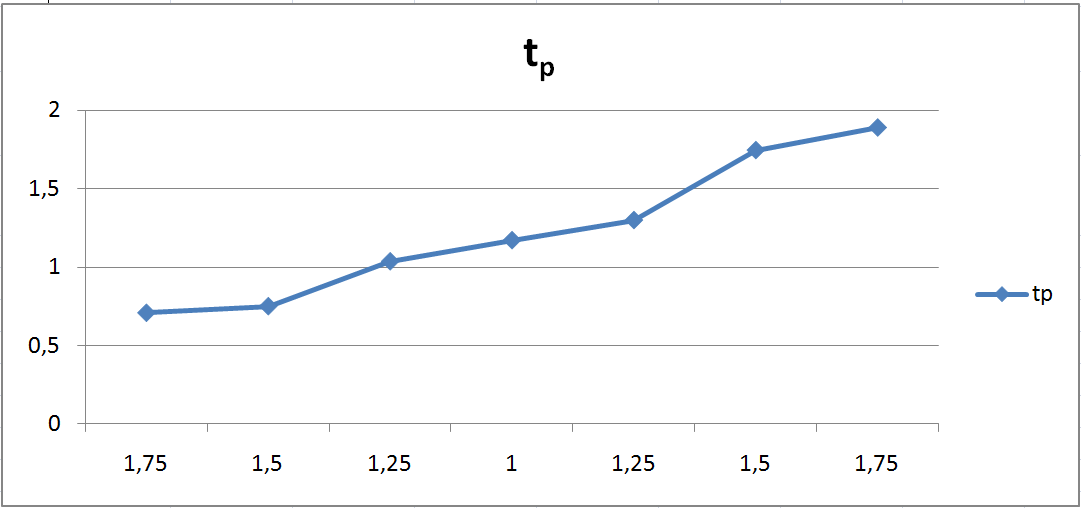
Зависимость 
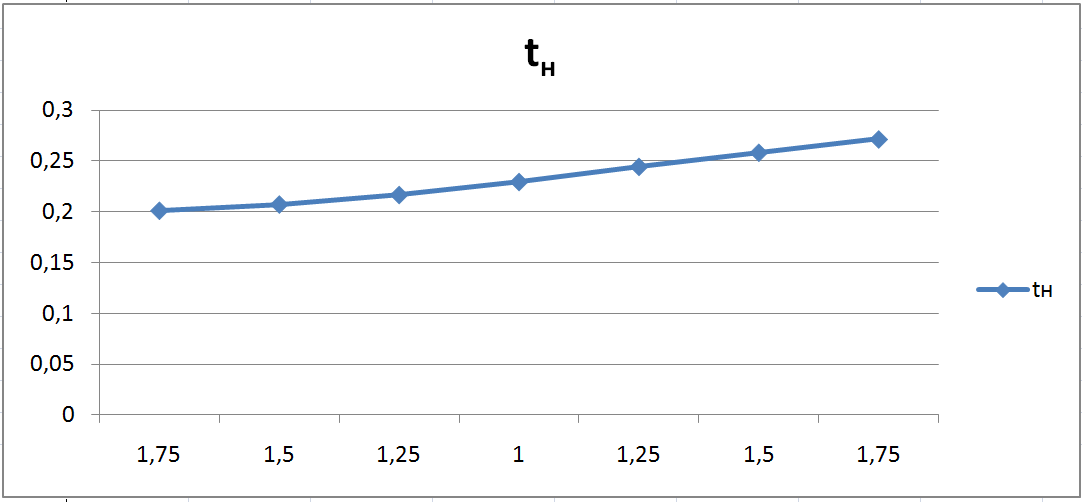
Зависимость 
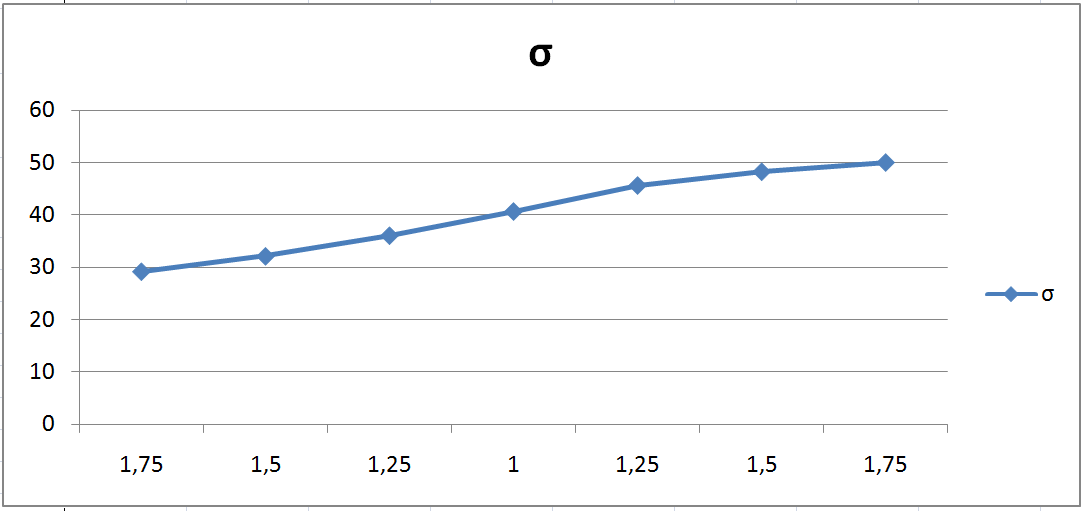
Зависимость 
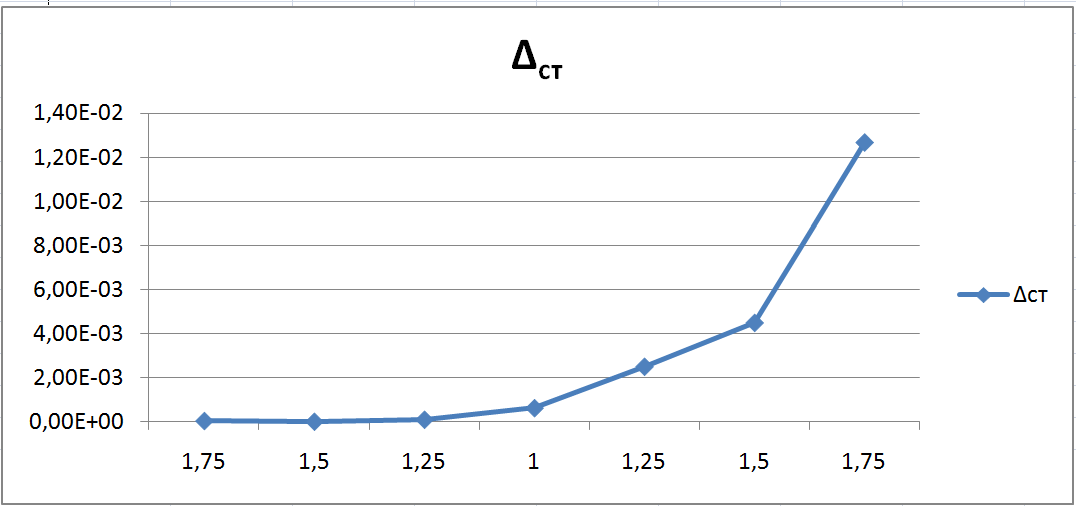
При увеличении Т3 наблюдается также увеличение всех параметров .
Список использованной литературы:
1. Куцый, А.С. Основы теории управления. Лабораторный практикум: лабораторные работы № 1-5 / Н.Н. Куцый. – Иркутск: ИрГУПС, 2008. – 72 с.
2. Теория систем автоматического регулирования / В. А. Бесекерский, Е. П. Попов. - Изд. 2-е , испр. и доп. - М. : Наука, 1972. - 767 с. : a-a-ил
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.