В теории и практике автомобиля и трактора изучают два вида поворота — поворот с малыми радиусами при низкой скорости движения и поворот с большими радиусами на высокой скорости движения. Рассмотрим кинематику поворота машины при движении с малой скоростью на примере наиболее распространенного способа поворота как для автомобилей, так и для колесных тракторов (рис. 8.8, а).
Точка О1 представляет собой центр вращений, называется полюсом поворота. В общем случае эта точка имеет текущие координаты.
Расстояние от полюса поворота О1 до оси заднего моста машины принято называть радиусом поворота Rn. Из рисунка 8.8, а видно, что
Rп=Lctgα.
При постоянном установившемся радиусе поворота положение полюса не изменяется. Чтобы все колеса вращались без бокового скольжения и без шоковых деформаций шин, полюс поворота в любой момент (на входе и выходе их поворота) должен лежать на пересечении осей всех колес. Это означает, что по сравнению с нейтральным положением управляемые колеса должны быть отклонены на разный угол. Согласованный угол поворота наружного и внутреннего управляемых колес в зависимости от конструктивных параметров автомобиля можно найти из рисунка 8.8, а:
ctgαн(Rп+a)/L; ctgαвн=(Rп-a)/L, где а — расстояние от оси шкворня до оси симметрии машины.
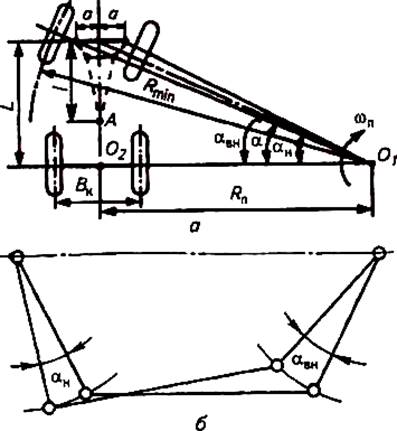
Рисунок 8.8 - Кинематика поворота машины с передними управляемыми колесами: 1 - схема поворота при качении без бокового увода; б— схема работы трапеции
Разность ctgαн-ctgαн=2а/Lявляется постоянной величиной, не зависящей от радиуса поворота. Чтобы соблюдалось требуемое соотношение между углами αн и αнв, в рулевом механизме применяют шарнирный четырехзвенник, называемый рулевой трапецией. Подбирая соответствующие значения ее параметров, геометрию элементов и кинематику в целом, получают соотношение между αн и αнв, близкое к теоретическому. Из перечисленных факторов определяющее значение для достижения этой цели имеет выбор наклона поворотных рычагов таким, чтобы при положении, соответствующем прямолинейному движению машины, их осевые линии пересекались в точке А (рис. 8.8, а). Расстояние l от оси передних управляемых колес до точки А принимают в пределах (0,7-0,9)L (рис. 8.8, б).
Следует иметь в виду, что изменение ширины регулируемой колеи трактора относительно базового значения приведет к нарушению оптимального соотношения между αн и αнв.
Один из главных показателей управляемости колесного трактора — минимальный радиус поворота. Его определяют как радиус окружности, описываемой передним наружным колесом при максимальном угле поворота управляемых колес, измеряя диаметр окружности, проведенной через середину следа переднего наружного колеса.
Минимальный радиус поворота трактора экспериментально определяют как половину диаметра окружности от следа переднего наружного колеса. Опыты проводят на стерне и поле, подготовленном под посев, с подтормаживанием и без подтормаживания борта при движении со скоростью 3,6-7,2 км/ч при максимальном угле поворота управляемых колес.
Оценочными показателями управляемости являются также внешний и внутренний габаритные радиусы поворота, а также габаритная ширина коридора поворота. Эти параметры характеризуют возможности машины перемещаться в стесненных по ширине условиях. С целью определения габаритных радиусов измеряют диаметр окружности, проведенной через проекции на площадку наиболее и наименее удаленных от центра поворота точек машины. По их разности вычисляют габаритную ширину поворота.
Силовое взаимодействие управляемых колес трактора с опорной поверхностью существенно зависит от колесной формулы.
Ведущие задние колеса передают на передний мост толкающую силу, равную касательной силы тяги Рк. Поворот будет возможен, если сцепление управляемых колес с почвой будет больше толкающего усилия
Gпφ>Pк.
Учитывая, что Рк=Рf/cosα
φ≥Pf/Gпcosα.
Тогда условие качения управляемых колес в плоскости их вращения примет вид φcosα≥f.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.