Занос менее опасен, чем опрокидывание. Чтобы избежать опрокидывания и свести действие боковых сил только к заносу, конструкторы стремятся снизить центр тяжести машины.
8.3. Управляемость колесных тракторов
8.3.1. Способы поворота колесных машин
Под управляемостью понимают способность машины двигаться по заданной траектории с требуемой точностью при воздействии водителя на механизм управления.
Управляемость обусловлена двумя свойствами машины: устойчивостью при неуправляемом движении и реакцией на управляющее воздействие водителя. Эти два альтернативных свойства должны быть присущи машине в определенном соотношении. Тогда машина в целом будет обладать хорошей управляемостью. Разграничить эти свойства машины весьма трудно, поэтому их рассматривают совместно, различая курсовую управляемость и курсовую устойчивость.
Качество управляемости колесных и гусеничных тракторов оценивается в полевых условиях по агротехническим показателям, обусловленными курсовой устойчивостью и поворачиваемостью.
Различают следующие способы поворота:
• управляемыми колесами только передней оси (рис. 8.6, а);
• управляемыми колесами обеих осей двухосной машины (рис. 8.6, б);
• бортом за счет создания разности крутящих моментов на ведущих колесах кинематически или торможением (рис. 8.6, в);
• комбинация первого или второго способа с третьим (рис. 8.6, г);
• с помощью шарнирно сочлененной рамы (рис. 8.6, д).
Первый способ поворота применяют во всех автомобилях и тракторах колесных формул 4К2 и 4К4, у которых диаметр передних колес меньше, чем задних. Этот способ наиболее приемлем для транспортных средств, поэтому его применяют во всех случаях, когда нет ограничений.
Основное ограничение для использования первого способа — возможное соприкосновение колес с остовом двигателя или трактора при повороте управляемых колес. Если передняя часть машины широкая или диаметр управляемых колес очень большой, угол поворота их уменьшается, увеличивая минимальный радиус поворота и снижая маневренность (при заданной колее) трактора. В этом случае применяют шарнирную раму или четыре управляемых колеса, а также бортовой способ поворота, который может быть осуществлен только на тракторах колесной формулы 4К4б.
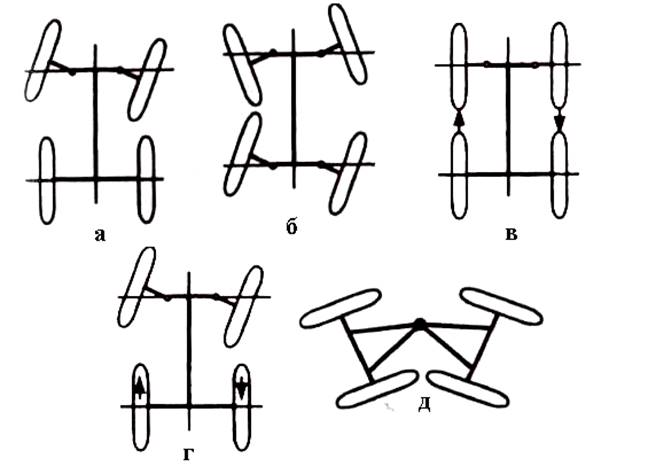
Рисунок 8.6 - Способы поворота колесных тракторов
Основной недостаток способа управления поворотом с помощью шарнирной рамы заключается в том, что при маневрировании передний и задний мосты поворачиваются одновременно, но в разные стороны. Это приводит к тому, что при необходимости увеличить расстояние между колесами и бороздой или рядком обрабатываемой культуры в процессе управления передний мост отъезжает (удаляется) от борозды или от рядка обрабатываемой культуры, а задний мост приближается. При этом достигается обратный эффект, в результате которого стенка борозды разрушается задним колесом или оно заезжает на рядок обрабатываемого растения. Как правило, из разрушенной борозды трактор не может выехать, не сделав огреха. Этот недостаток присущ и трактору с четырьмя управляемыми колесами.
Торможение бортом на колесных машинах (рис. 8.6, в) применяют крайне редко, потому что поворот при этом сопровождается сильной деформацией шин и большими потерями мощности.
Торможение одного из задних колес при повороте (рис. 8.6, г) как вспомогательное используют практически на всех универсально-пропашных тракторах. В эксплуатации подтормаживанием борта пользуются при выполнении крутых поворотов.
8.3.2. Кинематика и динамика поворота
Способы поворота многоосных машин показаны на рисунке 8.7. Если все колеса управляемые, возможно движение «крабом» (последняя схема на рис. 8.7). Этот способ перемещения машины применяют в экстремальных условиях, когда из исходного положения в нужный пункт следует переместиться по кратчайшей траектории (по прямой), не прибегая к поворотам.
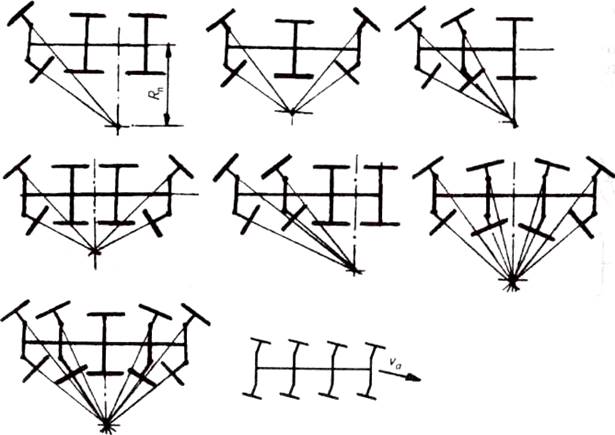
Рисунок 8.7 - Способы поворота многоосных машин
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.