В классе же нелинейных систем нет в настоящее время общей теории расчета, а существующие методы позволяют решать лишь частные задачи для ограниченного класса систем. Для ответа на вопрос, можно ли аппроксимировать систему линейной моделью, следует обратить внимание прежде всего на математическое описание функциональных элементов системы в различных режимах ее работы. Рассмотрим систему стабилизации скорости. Очевидно, что в режиме нормальной эксплуатации системы, когда система стабилизирует заданную технологическим регламентом скорость вращения мельницы, модель системы можно считать линейной, так как все функциональные элементы допускают линеаризацию в отклонениях. Тогда модель системы можно представить линейной в отклонениях от этого режима. Учитывая, что математическим аппаратом классической теории являются в основном операционное исчисление и преобразования Фурье, структурную схему системы целесообразно представить в терминалах передаточных функций (рис. 3).
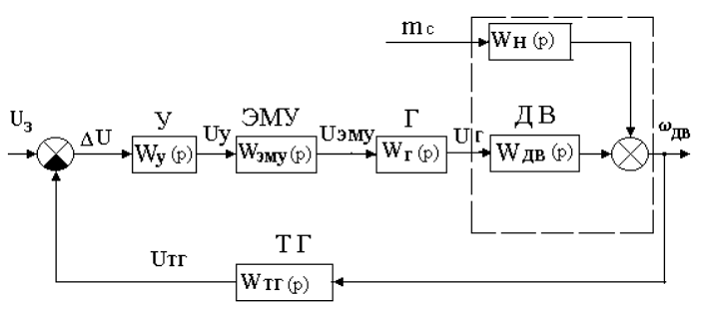
Рис. 3 Структурная схема системы стабилизации скорости вращения мельничного агрегата.
Формализация в виде структурной схемы наглядна, позволяет проследить и проанализировать прохождение сигнала через элементы схемы и допускает хорошую физическую интерпретацию.
Однако реальная система всегда содержит нелинейности, хотя в ряде случаев их влияние несущественно и большинство свойств реальной системы можно изучить и предсказать, пользуясь рассмотрением линейной модели.
При внимательном рассмотрении, например, системы стабилизации скорости вращения мельничного агрегата можно отметить, что привод не всегда может обладать теми динамическими возможностями, которыми он должен был бы обладать по линейной теории. Такое влияние оказывают в основном нелинейности типа насыщения, т.е. ограниченные величины энергоносителя или его мощности.
Действительно, линейная зона электронного усилителя превышает уровень полезного сигнала всего в 1,5- 2 раза, так как большее увеличение нецелесообразно (это приводит к существенному завышению мощности усилителя по сравнению с тем значением, которое требуется для воспроизведения полезного сигнала).
Однако могут возникнуть (хотя и редко) такие ситуации, когда технолог переходит на другой режим работы агрегата, связанный с повышением числа оборотов двигателя, а следовательно, и величины полезного сигнала на входе усилителя, и одновременно уменьшает уровень заполнения мельницы рудой. Это приведет к еще большему увеличению сигнала на входе усилителя и он может выйти за пределы его линейной зоны, т.е. войти в зону насыщения усилителя. Как видим, в таком режиме работы системы ее линейная модель не отражает всех свойств реальной системы.
Можно рассмотреть и случай малых входных сигналов, когда его уровень лежит в пределах зоны нечувствительности усилителя или тахогенератора. И в этом случае линейная модель не адекватна реальной системе, работающей в режиме малых входных сигналов. В режимах больших и малых входных сигналов систему целесообразно описывать нелинейной моделью. Так, в рассматриваемом примере структурная схема примет вид рис. 4.

Рис.4 Структурная схема модели САР скорости вращения мельничного агрегата в режиме малых и больших входных сигналов.
Аналогичная ситуация может возникнуть и при наличии помех в системе. Происходит так называемый эффект "забивания" усилительного тракта помехой, что приводит к необходимости введения в контур системы оглаживающих фильтров.
Естественно, встает вопрос, какую из моделей системы принять как основную для расчета. В данном примере казалось бы правильным выбрать нелинейную модель, как наиболее полно отражающую процессы в системе. Однако, как уже отмечалось, это приведет к резкому усложнению расчетов, поскольку придется использовать методы теории нелинейных систем. Поэтому, учитывая, что линейная модель описывает основной (наиболее вероятный) режим работы системы, ее можно принять как основную для синтеза системы стабилизации в окрестности этого рабочего режима, а затем, когда линейная САР будет разработана, исследовать поведение в режимах малых и больших входных сигналов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.