При построении среднечастотной части делаемой ЛАХ надо определить постоянную времени ![]() и сумму малых постоянных
времени
и сумму малых постоянных
времени  . Для их определения используют формулы
. Для их определения используют формулы
 ; (2.6)
; (2.6)
 . (2.7)
. (2.7)
При использовании выражения (2.7) следует учесть, что все малые постоянные времени могут быть сделаны, например, равными друг другу.
Если ![]() , то сумма
, то сумма  и в этом случае желаемая ЛАХ после частоты среза переходит на
сопряженной частоте
и в этом случае желаемая ЛАХ после частоты среза переходит на
сопряженной частоте ![]() с наклоном -20 дБ/дек
на -80 дБ/дек, поэтому
получим
с наклоном -20 дБ/дек
на -80 дБ/дек, поэтому
получим
 . (2.8)
. (2.8)
Очень важно, чтобы сумма малых постоянных времени выбранной желаемой ЛАХ не превосходила величины, полученной по формуле (2.7). Для всех желаемых ЛАХ, приведенных в табл. 2.2, показатель колебательности
 , (2.9)
, (2.9)
где  .
.
Связь между показателем колебательности ![]() и другими качественными показателями
для типовых желаемых ЛАХ приведена
в табл. 5.
и другими качественными показателями
для типовых желаемых ЛАХ приведена
в табл. 5.
Таблица 5
|
|
1,1 |
1,2 |
1,3 |
1,4 |
1,5 |
1,6 |
1,7 |
|
|
18,8 |
20,3 |
26,5 |
33,2 |
37,2 |
40,7 |
44,6 |
|
|
7,75 |
6,3 |
5,85 |
5,6 |
5,45 |
6 |
7,25 |
|
|
55 |
50 |
46 |
42 |
39 |
36 |
32 |
|
|
3,32 |
2,45 |
2,08 |
1,87 |
1,73 |
1,63 |
1,56 |
Покажем на примере методику формирования желаемой ЛАХ по В. А. Бесекерскому.
Пример 1. Рассчитать и построить желаемую ЛАХ ![]() для типовой следящей системы рис. 14 с астатизмом 1-го порядка, на входе которой действует качка с параметрами
для типовой следящей системы рис. 14 с астатизмом 1-го порядка, на входе которой действует качка с параметрами ![]() =5
град/с;
=5
град/с; ![]() =2 град/с2, если известно, что максимальная
ошибка
=2 град/с2, если известно, что максимальная
ошибка ![]() =1, показатель
колебательности
=1, показатель
колебательности ![]() £1,5,
передаточный коэффициент
редуктора
£1,5,
передаточный коэффициент
редуктора = 1/3500, крутизна датчика
= 1/3500, крутизна датчика
![]() =34,4 В/рад; постоянная времени усилителя
=34,4 В/рад; постоянная времени усилителя![]() =0,02 с, постоянная времени двигателя
=0,02 с, постоянная времени двигателя ![]() = 0,1 с, коэффициент передачи двигателя
= 0,1 с, коэффициент передачи двигателя ![]() =5,7
рад/(В
=5,7
рад/(В![]() ), момент
сопротивления нагрузки
), момент
сопротивления нагрузки ![]() =
35000 Гсм,
жесткость механической
характеристики двигателя
=
35000 Гсм,
жесткость механической
характеристики двигателя ![]() = 0,16 Гсмс/рад.
= 0,16 Гсмс/рад.
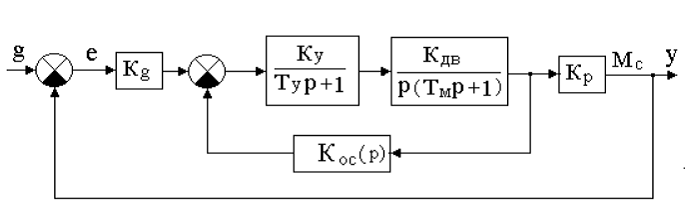
Рис. 14. Структурная схема следящей системы
Решение. Из табл. 4 находим формулы
для определения ![]() и
и ![]() :
:
 ;
;
![]() ;
;
 .
.
Базовая частота согласно табл. 3.
 .
.
По формулам (2.6) и (2.7) определяем
 ;
;
 ;
;
 .
.
Для
правильного выбора параметров высокочастотной
части желаемой ЛАХ построим ЛАХ исходной нескорректированной
системы ![]() (рис.15) и ЛАХ низкочастотной части и среднечастотной части
желаемой системы
(рис.15) и ЛАХ низкочастотной части и среднечастотной части
желаемой системы ![]() .
.
Так как высокочастотные наклоны ![]() и
и ![]() должны совпадать, то примем
должны совпадать, то примем ![]() , т.е.
, т.е.  . В этом случае желаемая ЛАХ будет типа 1-2-1-3, а
. В этом случае желаемая ЛАХ будет типа 1-2-1-3, а  , поэтому
, поэтому  .
.
Для увеличения протяженности среднечастотной
части желаемой ЛАХ, т.е.
уменьшения М можно
продлить единичный наклон до пересечения с![]() . Это даст новую постоянную времени
. Это даст новую постоянную времени ![]() .
.
Передаточная функция желаемой системы
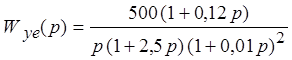 .
.
Коэффициент усиления усилителя
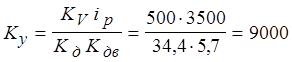 .
.
По
уравнению ( 2.9) можно проверить, вложились ли мы в требуемый показатель колебательности ![]() .
.
Так как 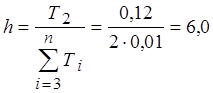 , то
, то
 , что обеспечивает нужные качественные
показатели.
, что обеспечивает нужные качественные
показатели.
2 Методика В. В. Солодовникова (второй тип задания)
Для построения низкочастотной часта желаемой ЛАХ по этой методике надо выбирать порядок астатизма и коэффициент усиления разомкнутой системы. Формулы для построения низкочастотной части могут быть получены из уравнений (2.1) - (2.4). Для типовых следящих систем они приведены в табл. 6.
Для построения среднечастотной
части желаемой ЛАХ надо
воспользоваться функциональную зависимость между перерегулированием ![]() и относительным временем переходного процесса
и относительным временем переходного процесса ![]()
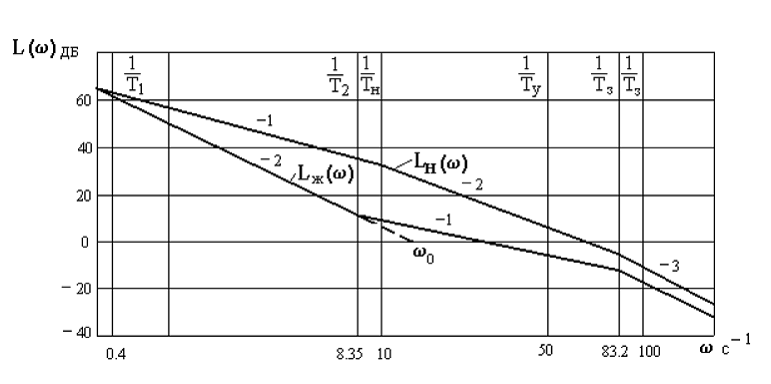 Рис. 15. Формирование желаемой ЛАХ по методу
Бесекерского.
Рис. 15. Формирование желаемой ЛАХ по методу
Бесекерского.
Таблица 6.
|
Тип воздействия |
Тип системы |
||
|
статическая |
астатическая 1-го порядка |
астатическая 2-го порядка |
|
|
Воздействие в виде скачков по положению скорости и ускорению соответственно |
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.