Если компенсирующая связь не обеспечивает абсолютной инвариантности, то в уменьшении влияния основного возмущения участвует и замкнутый контур регулирования.
Основной способ реализации условий инвариантности на основе принципа двухканальности (комбинированное управление)[3] нашел широкое распространение в инженерной практике.
Основными проблемами, возникающими при разработке комбинированной системы регулирования, являются:
измерение возмущения и преобразование сигнала в компенсирующей цепи;
методы расчета и техническая реализация компенсирующего устройства.
В ряде случаев непосредственное измерение возмущения не вызывает серьезных трудностей, например, несложно измерять возмущение, представляющее собой нагрузку объекта регулирования (момент сопротивления на валу электродвигателя, ток якоря электрического генератора, расход жидкости и т.д.). Однако иногда непосредственное измерение невозможно, и в этом случае строят системы с косвенным измерением возмущения [5 ].
Возможны различные варианты включения компенсирующей связи. Компенсирующая связь может подаваться на элемент сравнения, иногда непосредственно на исполнительный элемент. Однако основной вариант, когда сигнал компенсации подается на вход усилителя, который и усиливает этот сигнал. При сложном многокаскадном усилителе иногда бывает выгодно подавать сигнал компенсирующей цепи не на входной, а на один из промежуточных каскадов усилителя.
На вход объекта компенсирующая связь включается редко, так как в этом случае она должна иметь собственный исполнительный элемент - наиболее сложный и мощный элемент регулятора. Кроме того, параллельное использование двух исполнительных элементов возможно лишь в исключительных случаях.
В рассматриваемом примере измерение момента нагрузки на валу двигателя возможно, например, с помощью моментной муфты, и поэтому целесообразно организовать комбинированное управление с непосредственным измерением возмущения (рис. 29).
Существенной задачей на этом этапе работы является и техническая реализация компенсирующего устройства.
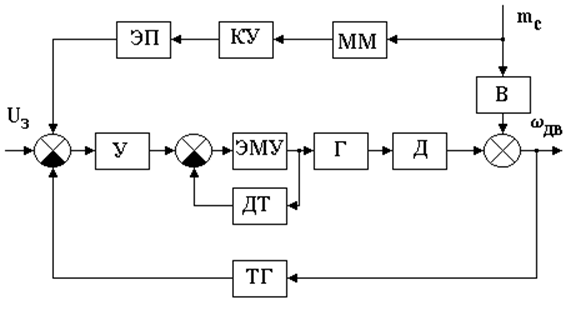
Рис. 29. Функциональная схема комбинированной системы регулирования скорости двигателя постоянного тока
Затруднения, которые при этом возникают, объясняются следующим. Сигнал компенсирующей цепи обычно должен быть сформирован так, чтобы преодолевались инерционные свойства исполнительного элемента системы, а иногда еще объекта регулирования усилителя. Для этого компенсирующий элемент должен создавать производные от поступающего на него сигнала и не иметь инерционных свойств.
Широко используются дифференцирующие устройства, которые создают первую производную от входного сигнала или первую и вторую производные. Наиболее простыми из таких устройств является пассивные электрические четырехполюсники постоянного тока.
Получать производные более высоких порядков сложнее. При определенной физической природе дифференцируемого сигнала повышается уровень помех, частота которых, как правило, выше частоты основного сигнала, особенно многократно дифференцируемого.
Следует также иметь в виду, что всякий реальный дифференцирующий элемент обладает и инерционными свойствами, проявление которых может быть уменьшено соответствующим выбором параметров элемента. Однако, значительное уменьшение инерционных свойств дифференцирующего устройства неизменно сопровождается увеличением его сложности.
При выполнении компенсирующего звена необходимо еще согласование его с элементом замкнутого контура, на который подается сигнал (выбором точки включения компенсирующей цепи определяется физическая природа и допустимые пределы изменения входного сигнала компенсирующего элемента). Не исключено, что при таком согласовании наиболее благоприятная структура может оказаться неосуществимой.
Компенсирующая связь по возмущению при его непосредственном измерении не влияет на свойства замкнутого контура системы комбинированного регулирования. Поэтому расчет компенсирующей цепи и расчет замкнутого контура могут проводиться раздельно, т.е. комбинированная система может быть расчленена на части.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.