Сутність методу безпосереднього перетворення електричних сигналів у гідравлічні полягає в наступному.
Нагнітальне сопло виконується нерухомим. Незатоплений струмінь робочої
рідини пропускається між розрядними електродами, один із яких плоский, а другий
закінчується двома вістрями. Між електродами існує коронний розряд, у зовнішній
області якого перебувають іони, що мають знак коронуючого електрода. Струмінь
рідини, що володіє властивостями діелектрика, у результаті бомбардування іонами
заряджається, а потім пропускається між електродами, що відхиляють, на які
подається керуючий електричний сигнал. У результаті взаємодії електричного поля
електродів, що відхиляють, із зарядженим струменем виникає сила, що відхиляє
струмінь убік одного із приймальних сопел та забезпечує керування
гідродвигуном. Експериментальними дослідженнями встановлено, що
запізнювання,  внесене електричною частиною електрогідравлічного
перетворювача, при передачі сигналів керування зневажливо мале в
порівнянні із запізнюванням, внесеним гідравлічною частиною.
внесене електричною частиною електрогідравлічного
перетворювача, при передачі сигналів керування зневажливо мале в
порівнянні із запізнюванням, внесеним гідравлічною частиною.
Гідравлічні слідкуючі приводи зі струменевою трубкою знаходять застосування не тільки у верстатобудуванні. На рис.3.6 показана схема автоматичного вагового елемента із приводом, керованим підсилювачем зі струменевою трубкою.
Тут струмінь рідини формується в нагнітальному соплі 4. Злив з корпуса здійснюється через штуцер 17.
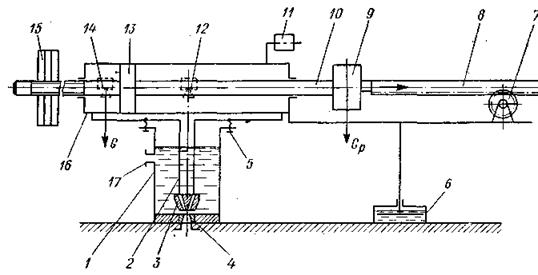
Рис. 3.6. Схема автоматичного вагового елемента з гідравлічним слідкуючим приводом.
Коли до призм 14 підвішується вимірюваний вантаж G, коромисло повертається проти годинникової стрілки до упору в лівий гвинт 5. При цьому нагнітальна струя потрапляє в ліве прийомне сопло, з'єднане з лівою порожниною гідроциліндра, змушуючи поршень 13 зі штоком 10 і рейтером 9 рухатися вправо. Цей рух триває доти, поки момент від ваги рейтера Ср не зрівноважить момент вантажу G, що змусить коромисло повернутися в первісне положення, при якому енергія нагнітальної струї рівномірно розподілиться між прийомними соплами й тиски в порожнинах гідроциліндра вирівняються. Масляний демпфер 6, що створює опір, пропорційний кутової швидкості коромисла, служить для заспокоєння його коливань. Поступальний рух рейтера 9 за допомогою рейки 8 і шестірні 7 перетвориться в обертальне з метою передачі показання вагового елемента на вторинний прилад, що реєструє. Дослідження цього пристрою показали його високу швидкодію й надійність у роботі при досить високій точності.
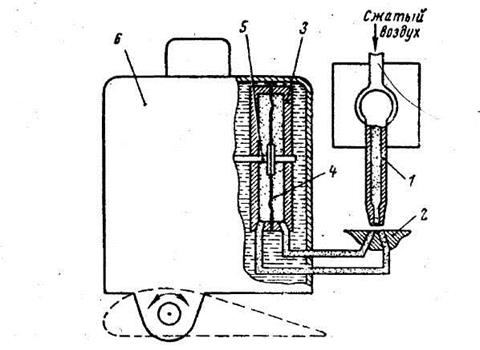
На рис. 3.7 наведена схема кермової машини «Асканія» одного з автопілотів. Вона являє собою сполучення пневматичного й гідравлічного приводів, причому в якості управляючого каскаду використовується пневматична струменева трубка . Кермова машина складається зі струменевої трубки 1 із прийомними вікнами 2, пневматичного виконавчого пристрою 3, чутливим елементом у якому служить мембрана 4, тяги 5, що жорстко зв'язана з керуючими золотниками наступного щабля гідравлічного приводу 6.
Прі відхиленні літака від заданого напрямку переміщення від чутливих
елементів автопілоту передається струминній трубці 1, зсув кінця якої призведе  до
перерозподілу тиску в прийомних вікнах 2. Так як прийомні вікна з'єднані
каналами з порожнинами виконавчого пристрою 3, то його мембрана 4 відповідно
прогнеться й захопить за собою тягу 5. Зсув тяги в ту або іншу сторону щодо
середнього положення змусить вихідний вал гідроприводу, на якому жорстко
посаджене кермо літака, зміщатися у відповідну сторону зі швидкістю, що
залежить від зсуву мембрани й величини зовнішнього навантаження на рули.
до
перерозподілу тиску в прийомних вікнах 2. Так як прийомні вікна з'єднані
каналами з порожнинами виконавчого пристрою 3, то його мембрана 4 відповідно
прогнеться й захопить за собою тягу 5. Зсув тяги в ту або іншу сторону щодо
середнього положення змусить вихідний вал гідроприводу, на якому жорстко
посаджене кермо літака, зміщатися у відповідну сторону зі швидкістю, що
залежить від зсуву мембрани й величини зовнішнього навантаження на рули.
Розглянута пневмогідравлічна кермова машина включена в систему без зворотного зв'язку. При її роботі існує замкнутий загальний контур літак-автопілот. Всі елементи системи включені відповідно так, щоб робота пневмогідравлічного привода зводилася до зменшення відхилення літака від заданого напрямку.
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.