Сила Fc действует при рабочем ходе ползуна. Находим значение Мпс в расчётном положении механизма:
![]()
Значения Мпс в остальных положениях механизма приведены в таблице 3.1.
3.2. Определение приращения кинетической энергии механизма.
Построив динамическую модель исследуемого механизма, приступим к ее анализу.
Анализ динамической модели будем проводить с помощью графоаналитического метода
Виттенбауэра. Для построения диаграммы необходимо знать законы изменения
приведенного момента инерции Iп и приращения кинетической энергии ![]() Т. Найдем закон изменения приращения
кинетической энергии.
Т. Найдем закон изменения приращения
кинетической энергии.
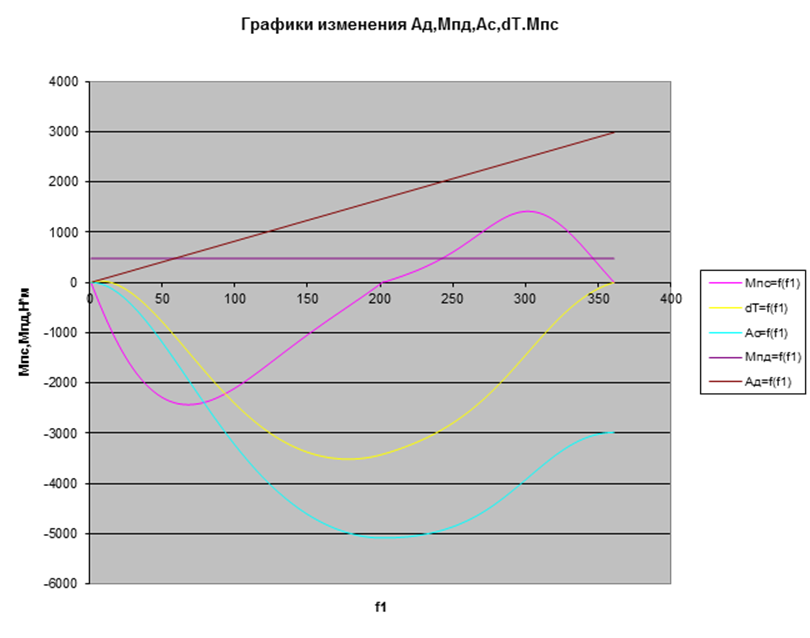
Сначала, в соответствии с (3.5) и таблицей 3.1 строим график функции Мпс = f(j1). При построении графика Мпс = f(j1) координатную систему располагаем в начале рабочего хода исследуемого механизма (Рис. 3.2). Затем находим работу Ас приведенного момента сил сопротивления Мпс. Работу Ас определяем численным интегрированием функции Мпс=f(j1). Интегрирование проводим, используя метод трапеций, в соответствии с которым
 , (3.6)
, (3.6)
здесь j = 0,1,… - номер положения механизма, для которого вычисляется работа. В начальном положении Ас = 0.
Значения Ас, найденные по формуле (3.6), заносим в таблицу 3.1 и по ним строим график функции Ас = f(j1) (Рис.3.2).
В установившемся режиме работа Ас приведенного момента сил сопротивления за цикл равна работе приведенных движущих сил Апд. Считая, что привод развивает постоянный по величине приведенный момент движущих сил Мпд, найдем его величину:

Знак минус указывает на то, что момент Мпд направлен на преодоление приведенного момента сил сопротивления Мпс. Строим график функции Мпд = f(j1) (Рис. 3.2).
Работу Ад приведенного момента движущих сил Мпд вычисляем по формуле
Адi = Мпдj1i, (3.7)
где i = 1, 2, … - номер положения механизма, для которого определяется работа Ад. В начальном (нулевом) положении Ад = 0.
Рассчитанные по формуле (3.7) значения работы движущих сил Ад заносим в таблицу 3.1 и по ним строим график функции Ад = f(j1) (Рис. 3.2).
Находим закон изменения приращения кинетической энергии ![]() Т, для чего алгебраически складываем
работы Ад и Ас
Т, для чего алгебраически складываем
работы Ад и Ас
![]() ,
,
где j = 0,1, 2… - номер положения механизма. Результаты
вычислений заносим в таблицу 3.1 и по ним строим график зависимости ![]() Т = f(j1) (Рис. 3.2).
Т = f(j1) (Рис. 3.2).
3.3. Определение момента инерции маховика. Подсчитываем величины сjmax и cjmin соответственно:
 ,
(3.8)
,
(3.8)
 ,
,
где  -
средняя угловая скорость начального звена механизма.
-
средняя угловая скорость начального звена механизма.
Найденные значения сjmax и cjmin заносим в таблицу 3.1. Из величин сjmax выбираем наибольшую величину сmax = -777,43Дж, а из cjmin - наименьшую cmin = -4218,49Дж.
Момент инерции подсчитываем по формуле:
 (3.9)
(3.9)
 .
.
3.4. Определение закона движения начального звена и
момента инерции маховика по диаграмме Виттенбауэра. Диаграмму Виттенбауэра
строим в системе координат ![]() Т = f(Iп)
(Рис. 3.3), точки на диаграмме получаем, откладывая значения координат Iпj
и
Т = f(Iп)
(Рис. 3.3), точки на диаграмме получаем, откладывая значения координат Iпj
и ![]() Тj, которые берем
из таблицы 3.1 при одном и том же значении обобщенной координаты j1. Построение диаграммы ведем, во
Тj, которые берем
из таблицы 3.1 при одном и том же значении обобщенной координаты j1. Построение диаграммы ведем, во ,
,  ,
,
где ![]() -
отрезки, изображающие на диаграмме истинные значения момента инерции и
приращения кинетической энергии.
-
отрезки, изображающие на диаграмме истинные значения момента инерции и
приращения кинетической энергии.
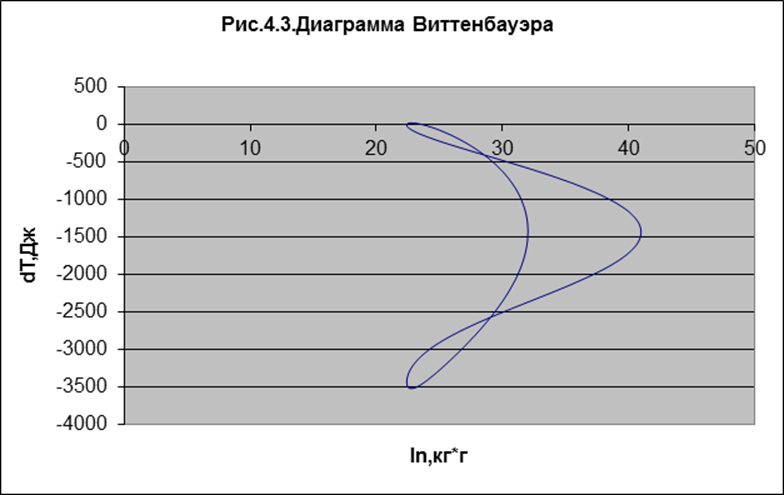
Вычисляем углы ymax и ymin наклона касательных к диаграмме Виттенбауэра, при реализации которых в механизме будет обеспечена требуемая неравномерность движения:
 ,
,
 .
.
Проводим под углами ymax и ymin к оси Iп касательные к диаграмме Виттенбауэра до пересечения с осью Iп в точках a и b.
Необходимый момент маховика подсчитываем по формуле
 .
.
3.5. Определение угловой скорости и углового ускорения начального звена механизма. Угловую скорость звена приведения механизма находим по следующей формуле:
 .
(3.10)
.
(3.10)
Для исследуемого механизма угловая скорость в расчетном положении определится:
 .
.
Для определения углового ускорения e1 запишем дифференциальное уравнение движения звена приведения:
 .
.
Из последнего уравнения находим e1
 . (3.11)
. (3.11)
Тогда угловое ускорение e1 исследуемого механизма в расчётном положении определится:
 .
.
Результаты динамического анализа механизма
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.