для звена 2: FИ2x = - m2 × аS2x = -21 × 7,19 = -150.99 H,
FИ2y = - m2 × аS2y = - 21× (-40.65) = - 853.65 H,
МИ2 = - IS2e2 = - 0,15 × (-3.39) = 0.5085 H×м;
для звена 3: FИ3x = - m3 × аS3x = - 120 ×(-4.79) = 574.8 H,
FИ3y = - m3 × аS3y = - 120 ×(-21,04) =2524 H,
МИ3 = - IS3e3 = - 0,38 ×(-3.39) =1.28 H×м;
для звена 5: FИ5x = - m5 × аS5y= - 1400 × (-5)= 7000 H,
FИ5y = 0
МИ5 = 0.
4.1.2. Силы, действующие на механизм. Для удобства дальнейшей работы в таблице 4.2 сведены все действующие на механизм силы и моменты в проекциях на оси координат со своими знаками.
Таблица 4.2
|
Силы веса, Н |
Силы инерции, Н |
Моменты сил инерции, Нм |
|||||||
|
F2y |
F3y |
F5y |
FИ2x |
FИ2y |
FИ3x |
FИ3y |
FИ5x |
МИ2 |
МИ3 |
|
-206,0 |
-1177,2 |
-13734 |
-150,99 |
853,65 |
574,8 |
2524 |
7000 |
0.5085 |
1.28 |
Так как направления сил и моментов учтены их знаками, то на расчетных схемах все силы изображаем в направлении координатных осей, а моменты – против часовой стрелки.
4.2. Определение уравновешивающего момента и реакций в кинематических парах аналитическим методом
4.2.1. Силовой анализ структурной группы 4-5. Рисуем структурную группу 4-5 (Рис.4.1,а). Прикладываем к ней с целью упрощения вычислений в проекциях на оси действующие на нее силы.
1. Записываем в проекциях на оси координат условия равновесия всех сил:
![]() Fc1 - F5y + FИ5y +R43y =
0, (4,2)
Fc1 - F5y + FИ5y +R43y =
0, (4,2)
![]() R50 + R43X =
0.
R50 + R43X =
0.
Из первого уравнения (4.1) находим R43y:
R43y= F5y - F1 - FИ5y ) =13734-27000=-13266 Н,
![]()
 |
|||
Из второго уравнения (4.2) находим![]() :
:
![]()
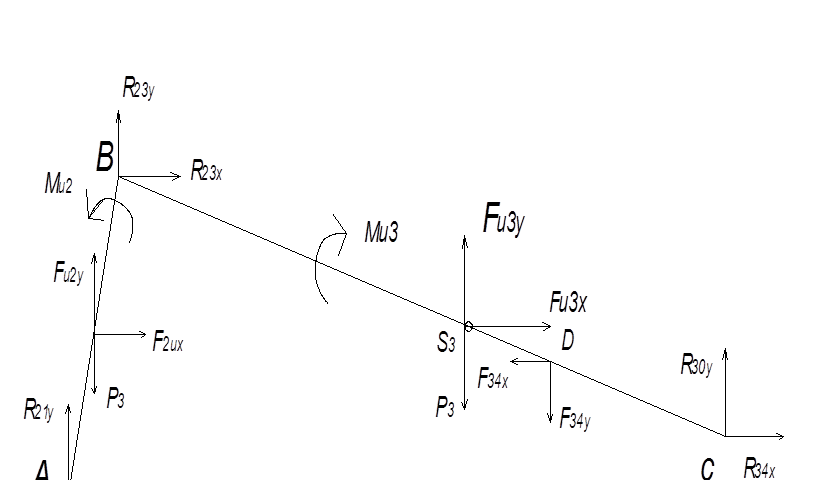
4.2.2. Силовой анализ структурной группы 2-3 (Рис. 4.1, б).Помимо заданных сил инерции, на группу действуют реакции R21, R30. Так же, чтобы не изображать отдельно звенья 2 и 3, в точке В прикладываем в проекциях на оси реакцию R23. Силы представлены через их проекции на оси координат.
Для определения реакции в кинематических парах С и А записываем два уравнения проекций сил на координатные оси и два уравнения моментов относительно точки В для звеньев 2 и 3:
![]()
![]()
(4.3)
![]()
![]()
![]()
для звена 2: 
![]() для звена 3:
для звена 3:

В результате получим
![]() ;
;
![]() ;
;
;
 |
 |
 |
Реакции R21 и R30 определятся соответственно:
![]()
![]()
 |
![]() (4,4)
(4,4)
Реакцию R23, действующую в кинематической паре В, находим из уравнения равновесия, например, звена 2:
![]() R23x + FИ2x + R21x =
0,
(4.5)
R23x + FИ2x + R21x =
0,
(4.5)
![]() R23y + FИ2y -P2 + R21y = 0,
R23y + FИ2y -P2 + R21y = 0,
откуда
R23x =- FИ2x - R21x = 150.99+1314.59=1465.58 Н,
R23y =- FИ2y + P2 - R21y = 206.01+7112.34-853.65=6464.7 Н.
Полная реакция будет
![]()
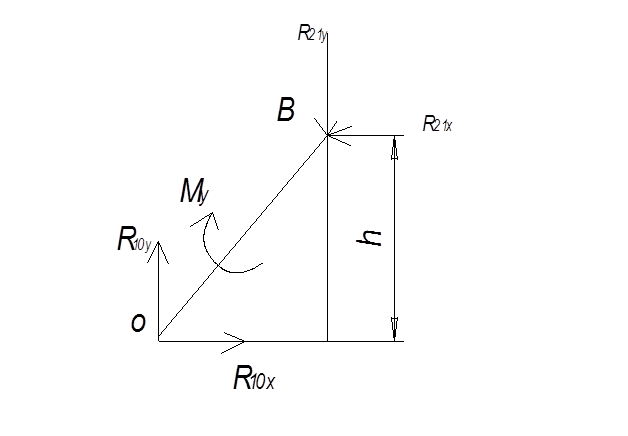
5.2.3. Определение уравновешивающего момента Му и реакции R10 в кинематической паре О.
 |
 |
 |
где h =cos33°×0.18=0.1492;
Му - уравновешивающий момент.
 |
 |
 |
в)
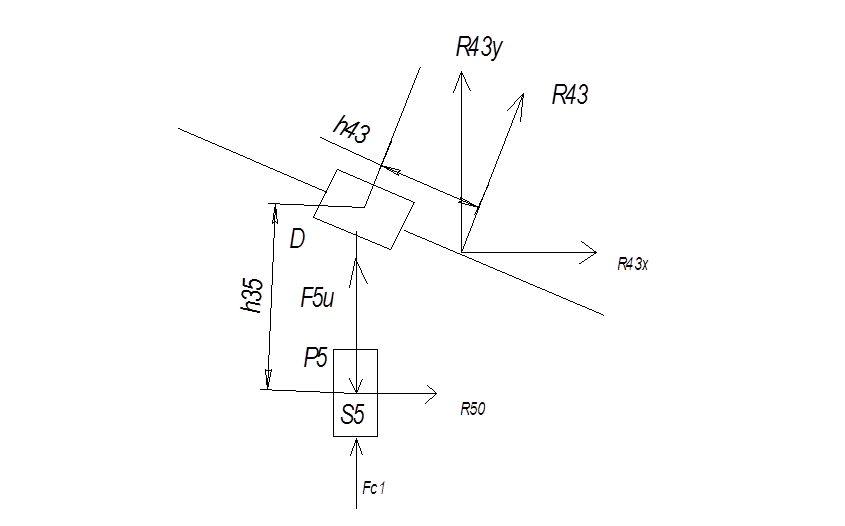
Рис.4.1. Силовой анализ механизма аналитическим методом
4.3. Определение уравновешивающего момента и реакций в кинематических парах графическим методом.
4.3.1. Силовой анализ структурной группы 4-5. Рисуем структурную группу 4-5 (Рис. 4.2, а) и прикладываем к ней все силы и моменты. Под действием приложенных сил и сил реакций структурная группа находится в равновесии. Подлежат определению реакции R50 и R43 во внешних кинематических парах, а также реакция R45 во внутренней кинематической паре D.
Силовой
анализ группы начинаем с определения касательной ![]() составляющей
реакции.
составляющей
реакции.
Определим реакции R50 и R43 из условия равновесия звеньев 4-5. Для этого запишем векторное уравнение сил, действующих на эту группу в целом. Векторное уравнение записываем таким образом, чтобы неизвестные реакции находились по краям.
![]() .
(4.7)
.
(4.7)
Уравнение (4.7) решаем графическим методом построения планов сил. Выбираем масштабный коэффициент сил mF = 400 Н/мм. Находим для известных сил величины отрезков, которыми они изображаются на плане сил:
Истинные величины реакций находим следующим образом:
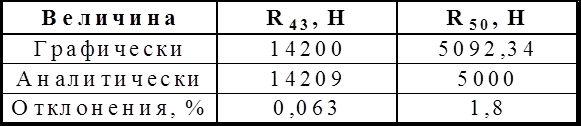
R43 = cd×mF = 35 ×400 = 14200 H;
R50x = da×mF = 12,5 × 400 = 5000 Н.
Данные, полученные в результате расчетов графическим и аналитическим методами, сводим в таблицу 4,3.
Результаты сго анализа структурной группы 4-5
Таблица 4.3
4.3.2.
Силовой анализ структурной группы 2-3. Рисуем структурную группу 2-3 и
прикладываем к ней все действующие силы и моменты (Рис.4.2, б). Реакции R30 и R21
изображаем разложенными на нормальные составляющие ![]() и
касательные
и
касательные ![]() составляющие соответственно.
Направление составляющих выбираем произвольно.
составляющие соответственно.
Направление составляющих выбираем произвольно.
Силовой
анализ группы начинаем с определения касательных ![]() составляющих
реакций. Для их определения составляем уравнение моментов относительно точки С
для звеньев 2 и 3 соответственно:
составляющих
реакций. Для их определения составляем уравнение моментов относительно точки С
для звеньев 2 и 3 соответственно:
![]() ,
,
![]() .
.
Выразив и подставив значения, получим:
![]() =-9287,4Н
=-9287,4Н
![]() =153,815Н
=153,815Н
Размеры длин звеньев берем из соответствующих планов положения механизмов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.