1.18. Проводим классификацию структурных групп по И. И. Артоболевскому.
Элементарный механизм условно отнесен к механизму I класса.
Класс структурной группы определяется числом кинематических пар, входящих в замкнутый контур, образованный внутренними кинематическими парами.
Порядок группы определяется числом внешних кинематических пар.
Вид группы определяется в зависимости от места размещения на ней вращательных и поступательных кинематических пар.
Таблица 1.3.
|
№ п/п |
Структурная схема |
Номер звеньев, образующих группу |
Класс |
Порядок |
Вид |
|
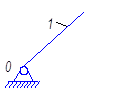
1 |
|
0-1 |
I |
- |
- |
|
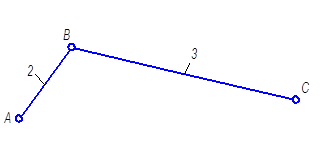
2 |
|
2-3 |
II |
2 |
1 |
|
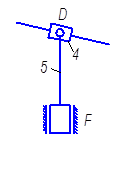
3 |
|
4-5 |
II |
2 |
5 |
1.19. Определяем класс сложного механизма стана. Механизм стана холодной калибровки труб относится ко II классу.
Кинематический анализ любого механизма состоит в определении: крайних (мёртвых) положений стана; положений звеньев, включая и определение траекторий отдельных точек; скоростей и ускорений характерных точек звеньев по известному закону движения начального звена (обобщённой координаты).
2.1. Определение крайних положений механизма аналитическим методом. Для исследуемого механизма крайними будут такие положения, когда кривошип и шатун то вытягиваются (ОАВ), то складываются (АОВ) в одну линию.
2.1.1. Определим первое мёртвое положение (Рис.2.2.1(а)). Начало рабочего хода совпадает с крайним (мёртвым) положением (верхнее крайнее).
![]() ;
;![]()
Из DBCО
найдём
по теореме косинусов угол a: ![]()

Определим угол b: 
Тогда ![]()
2.1.2. Определим второе мёртвое положение (крайнее нижнее) (Рис.2.2.1(б)), которое соответствует концу рабочего хода механизма.
![]() ;
; ![]()
Из DОBC найдём по теореме
косинусов угол g: ![]()

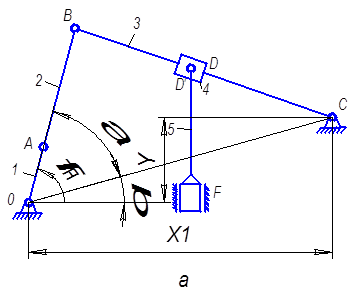
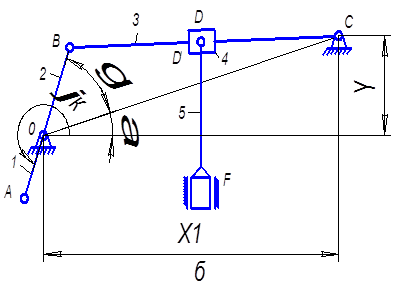
Рис. 2.1.Определение крайних положений механизма:
а – верхнее крайнее положение; б – нижнее крайнее положение
Определим угол a: 
Тогда ![]()
2.2. Для дальнейшего кинематического анализа, в частности, для определения положений звеньев и точек механизма, определения аналогов скоростей и ускорений графическим способом будем использовать промежуточный угол (j1 = 90,92225°+30°=120,9225°). Аналитически будем проводить кинематический анализ для 12 положений механизма.
2.2.1. Кинематический анализ механизма в расчётном положении с помощью аналитического метода векторных замкнутых контуров.
Структурную схему механизма располагаем в прямоугольной системе координат, начало которой помещаем в точку О. Со звеньями механизма связываем векторы и получаем два замкнутых контура: ОАВСО и СEFDC. При образовании контуров следует учитывать, что в него должно входить не более двух неизвестных. Углы, определяющие положение звеньев (векторов), отсчитываем от положительного направления оси OX в направлении против хода часовой стрелки (Рис. 2.2).
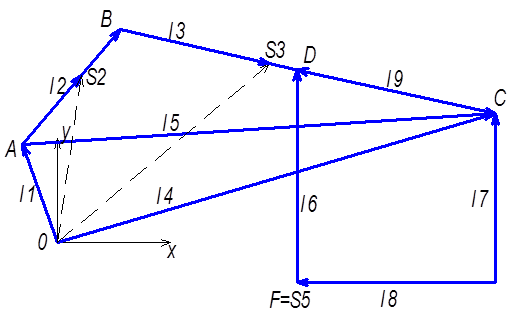
Рис. 2.2. Построение замкнутых векторных контуров
Записываем уравнение замкнутости первого контура:
l1 + l2 + l3 - l4 = 0 (2.1)
Уравнению (2.1) соответствуют два уравнения проекций на оси координат:
![]()
 (2.2)
(2.2)
Среди величин, входящих в уравнения (2.2), переменными являются f2, f3, f4. Угол f1 является обобщённой координатой механизма и поэтому он должен быть задан. Из уравнений (2.2) подлежат определению переменные параметры f2, f3 . Анализ системы уравнений (2.2) показывает, что система сложна для решения. Для упрощения нахождения углов f2, f3 вместо одного сложного контура ОАВСО рассмотрим два простых ОАСО и АВСА. Для этого введём в рассмотрение вспомогательный вектор l5 , соединяющий точки А и С. При этом получим
l1 + l5 - l4 = 0 (2.3)
l2 + l3 - l5 = 0 (2.4)
Представим уравнение (2.3) в проекциях на оси координат:
![]()
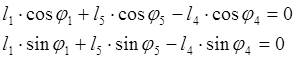 (2.5)
(2.5)
Из уравнения (2.5) находим угол наклона вектора l5,
учитывая, что  ,
, ![]() м.
для всех положений:
м.
для всех положений:
Так как вектор находится в первой четверти, то
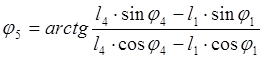
![]() ;
(2.6)
;
(2.6)

Найдём модуль вектора l5:
 ;
(2.7)
;
(2.7)
 м.
м.
Углы f2, f3 находим из уравнения (2.4), записав его в проекциях на оси координат:
 (2.8)
(2.8)
Слагаемые, содержащие угол f3 , переносим в
правую часть уравнений, возводим оба уравнения в квадрат и складываем.
Получим ![]()
![]() ,
(2.9)
,
(2.9)
где  угол между векторами l5 и l2
.
угол между векторами l5 и l2
.
Для расчётного положения 
![]()
Для определения угла f3 используем второе уравнение из системы (2.8):
Так как вектор находится в четвертой четверти, то
 ,
(2.10)
,
(2.10)
 .
.
Уравнение замкнутости второго контура:
![]() (2.11)
(2.11)
Представим уравнение (2.11) в проекциях на оси координат:
![]()
![]()
![]()
 (2.12)
(2.12)
Среди величин, входящих в систему уравнений (2.12) переменными параметрами являются l9 и l7 . Из первого уравнения системы (2.12) найдём l9, учитывая, что f6 = f7 =900 , f8 =1800 , f9 =f3 -1800 для всех положений:
 (2.13)
(2.13)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.