У преобразования Фурье,
наряду с его очевидными достоинствами, есть существенный недостаток: это
преобразование можно применить только к абсолютно интегрируемым функциям. Чтобы
расширить область абсолютно интегрируемой функции Лаплас умножил оригинал ![]() на динамический коэффициент
на динамический коэффициент ![]() , но при этом интервал интегрирования определил
, но при этом интервал интегрирования определил ![]() и
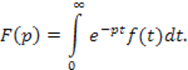
и ![]() . После таких дополнений преобразование Фурье приняло вид
. После таких дополнений преобразование Фурье приняло вид

Обозначив ![]() , получим
выражение, определяющее преобразование Лапласа
, получим
выражение, определяющее преобразование Лапласа
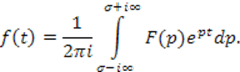
Для определения оригинала можно воспользоваться обратным преобразованием Лапласа
Как и в случае с
преобразованиями Фурье каждому значению преобразования Лапласа ![]() соответствует вполне определенное и единственное значение оригинала
соответствует вполне определенное и единственное значение оригинала ![]() .
.
2.4.1. Изображение элементарных функций
Преобразования Лапласа
являются основой операционного исчисления. В операционном исчислении принято
функцию ![]() называть оригиналом; функцию
называть оригиналом; функцию ![]() называть изображением.
называть изображением.
Если функция ![]() есть изображение функции
есть изображение функции ![]() , то это символически выглядит следующем образом:
, то это символически выглядит следующем образом: ![]() или
или ![]() или
или ![]() .
.
Функция Хевисайда
![]()

![]()
![]()

![]()
![]()
![]()
![]()

![]()
![]()

![]()
![]()

![]()
Свойства преобразования Лапласа
1. Линейность преобразования.
Теорема 1:
Если ![]() ;
; ![]() ;…;
;…; ![]() и
и ![]() - величина не зависящая от pиt, то справедливо равенство
- величина не зависящая от pиt, то справедливо равенство
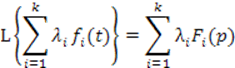
Теорема очевидна. Интеграл суммы есть сумма интегралов, а постоянный множитель можно вынести за знак интеграла

2. Линейность смещения
Теорема 2:
Если функция ![]() имеет изображение
имеет изображение ![]() , то
, то ![]() , будет иметь изображение
, будет иметь изображение ![]() .
.
Для доказательства найдем изображение

Таким образом ![]() .
.
Пример:
![]()
Т.к ![]() , то по
теореме смещения:
, то по
теореме смещения:
![]()
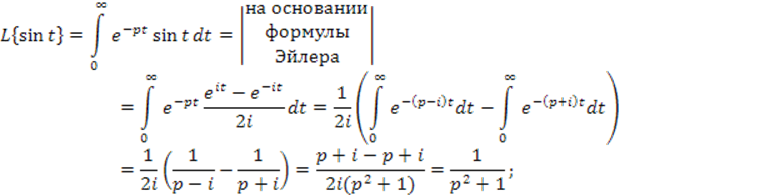
Аналогично можно определить смещение синуса:
![]()
Теорема 3:
Если функция ![]() имеет изображение
имеет изображение ![]() , то изображение смещенного оригинала
, то изображение смещенного оригинала ![]() будет иметь вид:
будет иметь вид:
![]()
Для доказательства воспользуемся определением преобразования Лапласа.

Умножим левую и правую части полученного выражения на ![]() .
.

Но тогда правая часть
последнего выражения есть, по определению, изображение Лапласа функции ![]() . И это изображение равно:
. И это изображение равно:
![]()
Что и требовалось доказать.
3. Изображение производной
Теорема 4:
Если функция ![]() имеет изображение
имеет изображение ![]() , то изображение производной функции
, то изображение производной функции ![]() будет определяться выражением
будет определяться выражением
![]()
Доказательство этой теоремы следует из определения преобразования Лапласа:

Теорема доказана.
Замечание
На основании доказанной теоремы можно найти изображение для производной любого порядка.
![]()
![]()
![]()
В общем виде изображение производной любого порядка будет иметь вид
![]() .
.
4. Дифференцирование изображения
Теорема 5:
Если
функция ![]() имеет
изображение
имеет
изображение ![]() , то производная
от изображения
, то производная
от изображения ![]() соответствует
соответствует
![]()
Для доказательства продифференцируем изображение по Лапласу:

Полученное вырожение соответствует
изображению функции ![]() Что и требовалось доказать.
Что и требовалось доказать.
Замечание1.
Производная n-го порядка от изображения соответствует функции ![]() .
.
Пример:
С помощью теоремы дифференцирования определим
изображение функции ![]() .
.
Функция Хевисайда имеет вид ![]()
Ее изображение
![]()
Или
![]()
5. Изображение интеграла
Теорема 6:
Если функция ![]() имеет изображение
имеет изображение ![]() , то
, то
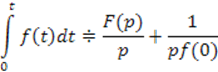
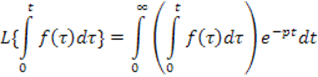
Для доказательства воспользуемся определением преобразования Лапласа
Известно, что несобственный интеграл
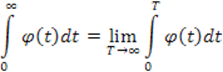
Тогда
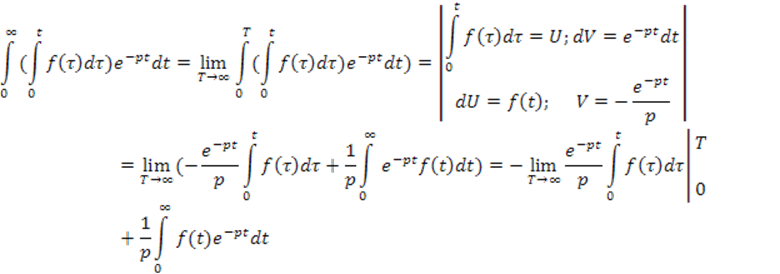
Первое
слагаемое последнего выражения равно нулю. Второе есть ![]() .
.
Что и требовалось доказать.
Теорема 7 (свертывания):
Если
![]() и
и ![]() , то
, то
Для доказательства найдем изображение

В правой части выражения находится
двукратный интеграл, который берется по области, ограниченной линиями ![]() .
.
 Изменим порядок интегрирования.
Изменим порядок интегрирования.
3. АНАЛИЗ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
3.1. Передаточная функция САУ
Математическую модель линейной стационарной динамической системы можно представить в виде линейно дифференциального уравнения n-го порядка
![]()
Левая часть последнего уравнения есть математическая модель собственного поведения системы. Правая часть – внешние воздействия (как правило через U обозначается внешние управляющие воздействия).
![]() – функция, определяющая состояние системы (неизвестная функция):
– функция, определяющая состояние системы (неизвестная функция):
![]() – коэффициенты (параметры) системы (будем считать, что они не меняются
во времени).
– коэффициенты (параметры) системы (будем считать, что они не меняются
во времени).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.