Кафедра «Системы управления»
В.Н. Гудима
Теория автоматического управления
Анализ линейных систем автоматического управления
(Методическое пособие для студентов дневной и заочной формы обучения)
г. Петропавловск – Камчатский
2008 год
Разработал доцент кафедры СУ Гудима Владимир Николаевич
Управление это есть воздействие на объект с целью придания ему заданного состояния. Управление предполагает наличие некой системы, которая в обязательном порядке включает в себя объект управления (ОУ) и регулятор.
Регулятор объединяет в себя все то, что создает управляющее воздействие (измерители, усилители, вычислительные устройства, исполнительные механизмы …).
Объект управления это есть то, на
что направлено управляющее воздействие. В качестве ОУ могу выступать:
- технические устройства (автомобили, летательные аппараты,
муфельные печи …). В этом случае речь идет о техническом управлении;
- технологические процессы (выпечка хлеба, изготовления боеприпасов, …) – технологическое управление;
- управление производством (цехом, заводом, комбинатом, …);
- политическое управление.
В данном курсе речь будет идти только о техническом управлении.
В зависимости от степени участия человека управление может быть:
- ручным. Это когда все управляющие действия выполняет человек;
- полуавтоматическим (автоматизированным). Это когда часть управляющих действий выполняет человек, а другая часть выполняется без его участия;
- автоматическим. Это когда все управление осуществляется без явного участия человека.
В дальнейшем речь будет идти только об автоматическом управлении.
Системы, которые управляются автоматически принято называть САУ, а теорию, которая изучает работу САУ и принципы ее построения, - ТАУ (Теория Автоматического Управления).
1. Классификация систем управления
Все системы
автоматического управления в зависимости от определенных признаков можно
разделить на следующие группы (классы):
По
принципу управления
- Разомкнутые системы. Управление по разомкнутой схеме
осуществляется по плану, без обращения внимания на состояние системы и на
воздействие возмущений.
 Для нормальной работы такой системы необходимо:
Для нормальной работы такой системы необходимо:
Хорошее знание свойства объекта и их неизменности в процессе работы системы,
отсутствие помех.
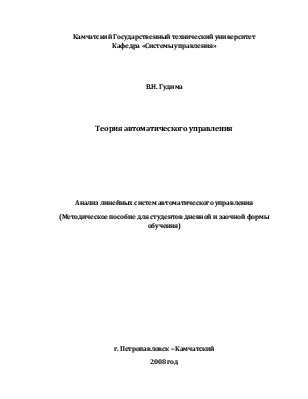
- Компенсационные системы. Система, построенная по компенсационному принципу - более точная чем системы прямого действия, но для нормальной ее работы необходима знать или закон изменения возмущений или иметь возможность эти возмущения измерять
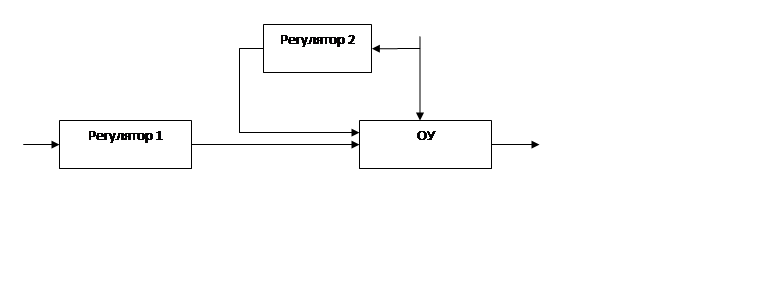 - - Замкнутые
системы. Такие
системы реализуют управление по отклонению (используется сигнал ошибки).
Управление по замкнутой схеме – основной принцип управления.
- - Замкнутые
системы. Такие
системы реализуют управление по отклонению (используется сигнал ошибки).
Управление по замкнутой схеме – основной принцип управления.
- Системы стабилизации (хзад = const). Такие системы должны поддерживать неизменными заданные параметры;
- Системы самонаведения;
- Системы программного управления (хзад = хзад(t)). В этих системах характер изменения управляемых параметров заранее определен;
- Системы телеуправления. Управление такой системой происходит с удаленного пункта;
- Следящие системы. Параметры этой системы должны повторять значения аналогичных параметров другой системы;
- Системы терминального управления. В этих системах заданы только их конечные состояния, а характер изменения параметров она определяет сама.
- Непрерывные. Это такая система, у которой при непрерывном изменении входной величины непрерывно меняются и выходные величины;
- Импульсные. В этих системах сигнал управления представляет собой импульсную кодовую посылку;
- Дискретные. В дискретных системах управляющее воздействие меняется ступенчато;
- Релейные. В релейных системах управляющее воздействие фиксированное и оно возникает при определенных условиях (управление по принципу «да – нет»).
По математическим признакам
- Линейные. Система называется линейной, если ее поведение описывается линейными дифференциальными или алгебраическими уравнениями;
- Нелинейные;
- Существенно нелинейные.
По способу настройки:
- Не оптимальные;
- Оптимальные;
- Не адаптивные;
- Адаптивные;
- С переменной структурой;
- С самонастройкой программы;
- С самонастройкой параметров;
- С самонастройкой структуры.
По типу ошибки в статике:
- Статические;
- Астатические.
- Детерминированные;
- Стохастические;
Для того, чтобы управлять ОУ надо знать в каком состоянии он находится, что воздействует на него и каков закон изменения (математическую модель) состояния системы при изменении внешних воздействий
Состояние системы, при
математическом описании, определяется вектором состояния системы Х={x1,x2,…,xn}т.
Здесь:
х1, х2, ..., хn – параметры (координаты вектора),
характеризующие состояние системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.