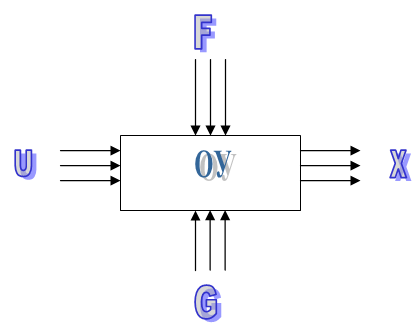
Если координаты вектора состояния измеряются (контролируются), то они называются наблюдаемые, если координаты вектора участвуют в управлении ОУ, то они являются управляемыми (Y={y1, y2. …,ym}т).
Внешние воздействия можно разделить
на:
- управление U = {u1, u2,…,ur}т;
- возмущения.
Последние могут быть:
- нагрузкой G
= {g1, g2, …, gs}т;
- помехой F
= {f1, f2, ..., fp}т
Задача системы управления – поддержание задаваемого режима функционирования объекта управления или другими словами – обеспечить требуемое поведение выходных величин.
Устройства, вырабатывающие управляющее воздействие, называют регулятором (УУ). Оно включает в себя:
- измерители (датчики
времени, температуры, давления, положения объекта в пространстве);
- преобразователи (устройства, преобразующие один вид сигнала в другой);
- вычислительные устройства (устройства, формирующие закон управления);
- исполнительные механизмы.
Исследование
САУ можно проводить теоретически или экспериментально. В данном курсе речь
будет идти только о теоретических возможностях исследования системы. Такай принцип
оправдан:
во первых – названием самого курса
(«Теория автоматического управления»);
во вторых – позволяет получить ответы на
многие вопросы априорно;
в третьих – теория позволяет не только
исследовать САУ, но и создавать новые системы, обладающими нужными качествами.
Для проведения теоретических исследований необходимо иметь математическую модель системы.
Математическое описание объекта позволяет установить связь между входными воздействиями и вектором состояния системы.
Если рассматривается статическое
состояние системы (когда все входные воздействия не меняются во времени, а сама
система закончила все переходные процессы), то поведение системы описывается
алгебраическими уравнениями
F(x, g, f, u) = 0.
Эта математическая модель не позволяет описать поведение системы в динамики, т.к. ступенчатое изменение входного сигнала приводит, согласно этой модели, к ступенчатому изменению выходных параметров, что не соответствует действительности (отсутствует переходный процесс).
Более точно поведение системы описывает дифференциальное уравнение, которое, в случае воздействия на систему только управления, в общем виде, можно представить как
F(x, x’, x’’, …, x(n), u, u’, u’’,…, u(m), t) = 0.
Это, как правило, нелинейное, нестационарное, неоднородное дифференциальное уравнение n – го порядка или система нескольких уравнений.
Создание математической модели САУ
Для определения математического описания поведения динамики объекта можно воспользоваться двумя подходами:
1) Использовать законы природы (механики, электротехники, гидравлики и т. д.) Такой способ математического описания можно реализовать, если объект достаточно простой и хорошо изучен.
2) Использовать опыт разработчиков (эвристический способ). Объект описывается по основным чертам внешнего поведения, без глубокого проникновения в сущность его функционирования. С такой моделью должны быть проведены: исследования на
адекватность (т.е. насколько модель соответствует поведению реального объекта) и определены границы этой адекватности.
При создании математической модели САУ целесообразно придерживаться следующего алгоритма:
1) Представить САУ в виде набора отдельных, достаточно простых звеньев;
2) Составить дифференциальное уравнение для каждого отдельно взятого звена;
3) Определить уравнения связи;
4) Составить структурную схему.
В результате моделирования динамические процессы системы описываются, как правило, нелинейными, нестационарными, неоднородными дифференциальными уравнениями n – го порядка
F(x, x’, x’’, … , x(n), t) = φ(g, g’, … ,g(m), t), (2.1)
Где х - вектор
состояния системы;
g -
вектор внешнего воздействия.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.