ТИ = Т = 0,27 час.
Тд = 0,15![]() Т = 0,0405 час.
Т = 0,0405 час.
4.4.2 Оценка качества регулирования
При помощи программы «Asotar» строим переходную характеристику замкнутой системы.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
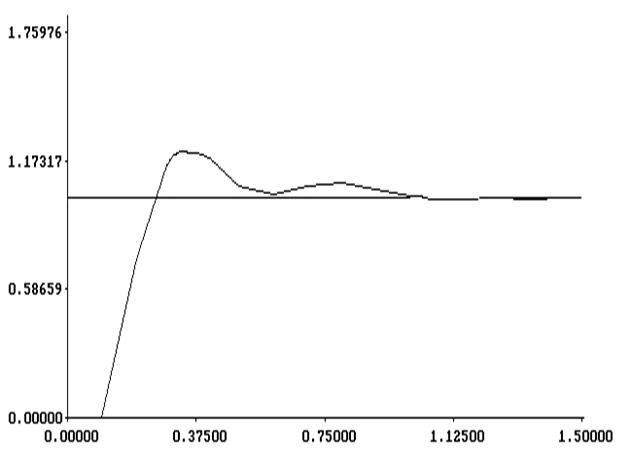
Переходный процесс замкнутой САР с настройками регулятора, полученными по таблице.
Рис.4.12
Определяем качество переходного процесса:
1.) Время регулирования: tр = 0,9 часа.
2.)
Перерегулирование: ![]() % =
% = ![]() 100%
= 22%
100%
= 22%
3.) Число колебаний: n = 2
4.) Время достижения первого максимума: tmax = 0,34 часа
5.) Время нарастания переходного процесса: tн = 0,26 часа
4.4.3 Метод расширенных АФЧХ.
Этот метод базируется на:
- использовании в качестве,
определяющего качество переходного процесса регулирования – степень
затухания ![]() ;
;
- определении расширенных амплитудно-фазовых характеристик объекта и регулятора;
- применение основного условия устойчивости замкнутой системы;
Степень затухания – величина, характеризующая затухание переходного процесса, равная отношению разности двух соседних амплитуд колебания (направленных в одну сторону) к первой из них:
![]()
В непосредственных
расчетах используется другой показатель качества, функционально связанный со
степенью затухания ![]() . Этим показателем является
степень колебательности m. Они
связаны между собой соотношением:
. Этим показателем является
степень колебательности m. Они
связаны между собой соотношением:
![]() = 1 – е -2
= 1 – е -2![]() m
m
Степень колебательности m характеризует затухание колебательных составляющих процесса регулирования.
Произведем расчет параметров настройки ПИД-регулятора методом расширенных АФЧХ.
Примем степень колебательности m = 0.7.
W(p)об = ![]()
Путем замены p = (j-m)![]() определим РАФЧХ объекта Wоб(m,j
определим РАФЧХ объекта Wоб(m,j ![]() разложив
ее на действительную и мнимую части:
разложив
ее на действительную и мнимую части:
W(m,j![]() )об=
)об= ![]()
![]()
Преобразуем и получаем:
Pe(![]() )об =
)об =![]()
![]() (4.24) Im(
(4.24) Im(![]() )об = j
)об = j![]()
![]() (4.25)
(4.25)
Исходным условием при расчетах оптимальных параметров настройки является соотношение:
Wоб(m,j![]() )Wр(m,j
)Wр(m,j![]() )
= 1, (4.26)
)
= 1, (4.26)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.