8. . В общем случае установившаяся ошибка e0, или точность регулирования, определяется как разность между установившимся значением регулируемой величины хо после окончания переходного процесса и ее заданным значением go: e0=go–xo. Показатели качества системы регулирования можно определить непосредственно из графика переходного процесса.
Условно переходной процесс в системах при скачкообразном входном воздействии можно разделить на три группы: монотонные, апериодические, колебательные.
А) монотонные – первая
производная не меняет знак![]() рисунок
рисунок
Б) апериодические – первая производная меняет знак один раз.
В) колебательные – первая производная меняет знак периодически.
18. Законы непрерывного регулирования)
|
Перемещение
рабочего органа пропорционально отклонению РВ от требуемого значения. ![]() Скорость регулирования
пропорциональна скорости отклонения РВ.
Скорость регулирования
пропорциональна скорости отклонения РВ. ![]() ,
где С1-const, являющаяся настроечным пар-ром рег-ра. Рег-р,
подчиняющийся этому закону, наз-ют статическим с одним параметром настройки или
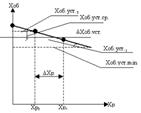
пропорциональным. В формулах знак минус указывает на то, что увеличению РВ -Хоб
соответствует регулирующее воздействие –Хр, направленное в сторону уменьшения
Хоб. Для регулятора входной величиной является выходная величина Об, а выходной
–его регулирующее воздействие.
,
где С1-const, являющаяся настроечным пар-ром рег-ра. Рег-р,
подчиняющийся этому закону, наз-ют статическим с одним параметром настройки или
пропорциональным. В формулах знак минус указывает на то, что увеличению РВ -Хоб
соответствует регулирующее воздействие –Хр, направленное в сторону уменьшения
Хоб. Для регулятора входной величиной является выходная величина Об, а выходной
–его регулирующее воздействие.
|
![]() что
соотв-ет усилительному звену
что
соотв-ет усилительному звену
Зная W(p)П
, можно найти: АФЧХ : ![]() ,
АЧХ: А(v)=С1
,
АЧХ: А(v)=С1
ФЧХ: j(v)=p , ЛАЧХ: L(v)=20 lgC1 , Переходная функция Хр(t)=-С1Хоб
|
Статическая характеристика П-рег-ра:
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.