Уравнения и
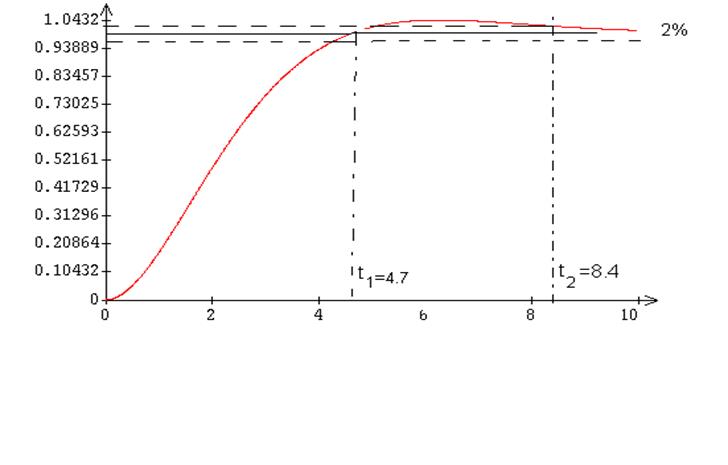
переходная функция, показанная на рисунке, являются типичными для любого
контура, оптимизированного по модулю передаточной функции, независимо от
конкретного исполнения звеньев. В соответствии с величиной ![]() будет изменяться лишь масштаб по оси времени
будет изменяться лишь масштаб по оси времени
![]()
Рис5. Переходная функция контура регулирования, настроенного
на оптимум модуля передаточной функции
2. Объект с большими и малыми инерционностями первого порядка.
Если среди многих инерционных звеньев объекта есть звено, постоянная времени которого больше суммы малых постоянных времени, то следует принять меры для компенсации этой постоянной. В противном случае она будет добавляться к сумме малых постоянны времени и снижать быстродействие контура.
Так как и в этом случае, регулирование должно осуществляться практически без ошибки, регулятор должен обладать интегрирующими свойствами. Для компенсации большой постоянной времени регулятору необходимо придать еще и пропорциональные свойства.
Передаточная функция контура с ПИ-регулятором имеет вид
Для компенсации
большой постоянной времени требуется равенство ![]() .
.
|
|||||
|
|||||
|
|||||
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рис.6 Структурная схема оптимизированного контура
При этом условии передаточная функция разомкнутого контура имеет вид
 , откуда для замкнутого
контура имеем
, откуда для замкнутого
контура имеем
 .
.
Используя условие
оптимизации ![]() ,
при
,
при ![]()
![]()
![]() найдём значение коэффициента усиления регулятора
найдём значение коэффициента усиления регулятора
![]()
Подставляя полученные значения параметров в исходное уравнение, получим уравнение оптимально настроенного замкнутого контура

![]()
Если в цепочке инерционных звеньев первого порядка находятся две большие инерционности, то для их компенсации регулятор должен обладать двумя упреждающими (форсирующими) звеньями. Без компенсации инерционностей система будет с большим замедлением реагировать на изменение задающей величины и нейтрализовать возмущающее воздействие. В этом случае необходимо применить ПИД - регулятор
 .
. ![]()
Большую постоянную времени
всегда необходимо компенсировать временем ![]() ,
а меньшую – временем
,
а меньшую – временем ![]() .
.
Пример: пусть объект регулирования содержит четыре инерционных звена с постоянными времени Т1=400мС, Т2=80мС, Т3=15мС, Т4=5мС. Рассмотрим варианты оптимальных настроек контура, используя регуляторы разных типов.
И-регулятор ![]() , Тр1=
4,7
, Тр1=
4,7![]() =2350 мС.
=2350 мС.
ПИ-регулятор ![]()
![]() ,
ТР=Т1=400 мС, Тр1=4,
,
ТР=Т1=400 мС, Тр1=4,![]() 7
7![]() =470 мС
=470 мС
ПИД-регулятор ![]() ,
ТР=Т1=400 мС,
,
ТР=Т1=400 мС, ![]() Т2 мС , Тр1=
Т2 мС , Тр1= ![]() мС.
мС.
Компенсировать третью постоянную времени с целью дальнейшего повышения быстродействия уже гораздо труднее. Для этого потребовалось бы иметь регулятор, обладающий свойствами интегрирования и двойного дифференцирования. Однако двукратное дифференцирование даже при очень малом содержании высших гармоник в колебаниях регулируемой величины приводит к такому снижению помехоустойчивости контура, что добиться стабильности регулирования в подавляющем большинстве случаев уже невозможно.
Кроме того, независимая настройка параметров такого ПИД - регулятора возможна только тогда, когда все три элемента, определяющие постоянные времени, отделены друг от друга с помощью соответствующих усилителей.
3. Объект с одной очень большой и несколькими малыми постоянными времени.
Если объект управления содержит инерционность,
постоянная времени которой в 20 и более раз превосходит сумму малых постоянных
времени ![]() , следует рассмотреть возможность использования П -
регулятора. Такой вариант давал бы для внешнего (подчиняющего) контура то
преимущество, что его можно было бы настроить по оптимуму модуля передаточной
функции. Это дает возможность иметь в уравнении высшего контура эквивалентную
постоянную времени ТЭ=2
, следует рассмотреть возможность использования П -
регулятора. Такой вариант давал бы для внешнего (подчиняющего) контура то
преимущество, что его можно было бы настроить по оптимуму модуля передаточной
функции. Это дает возможность иметь в уравнении высшего контура эквивалентную
постоянную времени ТЭ=2![]() . При других вариантах настройки приходится
использовать ПИ-регулятор и настраивать его по правилам симметричного оптимума,
что снижает быстродействие внешнего контура примерно в 2 раза.
. При других вариантах настройки приходится
использовать ПИ-регулятор и настраивать его по правилам симметричного оптимума,
что снижает быстродействие внешнего контура примерно в 2 раза.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.