Современные проблемы автоматизации и управления
Лекции проф. для магистров
Лекции 7 (30. 10) 06. 11 и 20. 11, оригинал0г
Содержание предыдущих двух лекций. Подробно изложена методика получения погрешностей преобразования информации по уровню сигналов в ДСАУ( "шумов" квантования ). Она связана с наличием колебаний уровней сигналов на выходах АЦП и ЦАП. Приведены примеры использования методики для расчета допустимых диапазонов регулирования скорости в робототехнических ЭМС и приводах станков с программным управлением.
ГЛАВА 4. Проблема устойчивости моделей нелинейных ДСАУ
4.1. Основные физические структуры ДСАУ и некоторые основополагающие сведения
В электромеханических САУ (ЭМС) обычно усилителями мощности являются дискретные нелинейные электронные устройства:
1) Регулируемый (управляемый) выпрямитель(УВ) – усилитель мощности
постоянного тока, работающий на достаточно малой частоте квантования (![]() ) Гц и имеющий ШИМ - 2.
Модуляцию, при которой амплитуда выпрямленного (выходного) напряжения
изменяется, повторяя форму (входного) переменного напряжения, и изменяется
ширина импульсов выхода.
) Гц и имеющий ШИМ - 2.
Модуляцию, при которой амплитуда выпрямленного (выходного) напряжения
изменяется, повторяя форму (входного) переменного напряжения, и изменяется
ширина импульсов выхода.
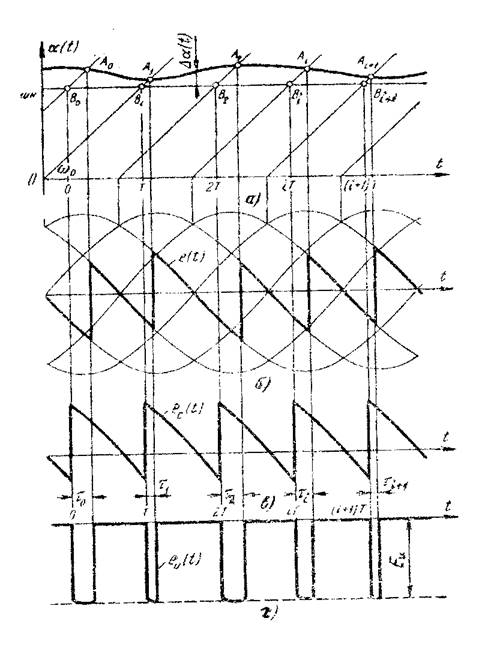
Этот, как и последующие усилители мощности, подробно изучались в курсе "Преобразовательная техника" ("Силовая электроника"). Поэтому в этом курсе мы касаемся лишь особых их свойств, поясняя тот или иной тезис наших лекций. На рис.1.7 , заимствованном из работы Валентина Павловича Шипилло [51], поясняется принцип реализации в УВ дискретного управления с ШИМ - 2.
Рис. 1.7, а поясняет
принцип изменения угла управления ![]() и его отклонения
и его отклонения ![]() от уровня
от уровня ![]()
![]() ,
на следующем
рисунке 1.7.,б, изображена кривая выпрямленной э. д. с. (напряжение) на выходе
УВ при питании от промышленной трехфазной сети переменного тока - e(t), которая определяется двумя
составляющими:
,
на следующем
рисунке 1.7.,б, изображена кривая выпрямленной э. д. с. (напряжение) на выходе
УВ при питании от промышленной трехфазной сети переменного тока - e(t), которая определяется двумя
составляющими:
![]()
где ![]() симметричная и импульсная
составляющие выхода УВ.
симметричная и импульсная
составляющие выхода УВ.
Симметричная кривая ![]() , изображенная на рис 1.7, в,
имеет постоянную составляющую, которая равна:
, изображенная на рис 1.7, в,
имеет постоянную составляющую, которая равна:
![]() , где m - произведение
"тактности" на "фазность" выпрямителя
, где m - произведение
"тактности" на "фазность" выпрямителя
Импульсная составляющая ![]() с широтно - импульсной модуляцией
второго рода (ШИМ - 2) изображена на рис. 1.7, г и имеет амплитуду:
с широтно - импульсной модуляцией
второго рода (ШИМ - 2) изображена на рис. 1.7, г и имеет амплитуду:
![]()
Статическая характеристика УВ, как усилителя мощности, также нелинейна. Поэтому модель этого преобразователя будет рассматриваться как нелинейного дискретного устройства.
 |
2) Широтно-импульсный преобразователь (ШИП), усилитель мощности постоянного тока, работающий на частотах (1- 2 до 10- - 15) кГ, имеющий ШИМ 1 (модуляцию, при которой амплитуда выпрямленного напряжения остается постоянной, а изменяется только ширина его импульсов).
На рис 2.7 изображена структурная схема дискретной САУ с широтно - импульсной модуляцией первого рода (ШИМ - 1). Здесь модели аналого - цифрового преобразователя
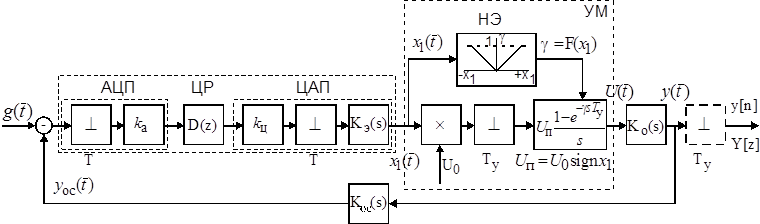
Рис.2. 7. Структурная схема дискретной нелинейной САУ с ШИМ - 1
(АЦП) и цифро - аналогового преобразователя (ЦАП) представлены по Я. Ципкину
(см. лекции по "Теории ДСАУ"). Длительностью их интервалов квантования "Т", по сравнению с длительностью "Ту", можно пренебречь. Тогда весь блок АЦП - ЦР - ЦАП представляется моделью аналогового регулятора той же структуры. Блок же УМ (широтно - импульсный преобразователь) представляет модель нелинейного дискретного устройства с ШИМ - 1, поскольку меняется лишь ширина его импульсов выхода t и=γТу, а их амплитуда постоянна U0. Статическая характеристика УМ также нелинейна - имеет зоны нечувствительности и насыщения.*)
3) Автономный инвертор (АИ) – преобразователь переменного тока постоянной амплитуды и частоты в переменный ток регулируемых частоты и амплитуды - усилитель мощности для приводов переменного тока, имеющий частотно импульсную модуляцию (ЧИМ).
Модели АИ рассмотрены в работе [54], и здесь не обсуждаются.**)
Все перечисленные виды модуляции ШИМ - 1, ШИМ - 2 , ЧИМ и другие обеспечивают получение дискретной модели системы.
В 60 – 70-е г.г. ХХ в. было выполнено много теоретических работ по разработке методов исследования моделей таких систем. При этом было разработано два направления в создании их моделей.
Первое направление – создание эквивалентной линейной модели ДСАУ, адекватной нелинейной ДСАУ. Основная задача заключалась в том, чтобы всякую нелинейную модуляцию адекватно заменить линейной.
Например, французский (?) ученый Андин (Andeen R.E.) [7] предложил достаточно простой метод замены нелинейной модуляции ШИМ - 1 линейной модуляцией АИМ- -1. Эпюры выходных импульсов первого модулятора изображены на рис.3. 7.
Передаточная функция ШИМ в аналоговой форме будет такой:
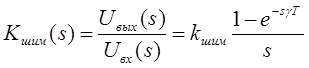 , так - как относительная ширина
импульсов
, так - как относительная ширина
импульсов ![]() , то модуляция является нелинейной.
, то модуляция является нелинейной.
Рис
3. 7. Эпюры сигналов выходов модулятров при
ШИМ - 1 и эквивалентной АИМ - 1 модуляциях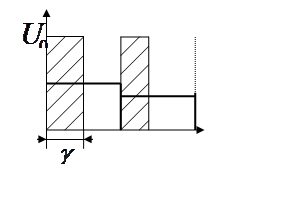
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.