Техническое нивилировани получило название в отличие от государственного классного классного нивилирования потому что оно производится для обслуживания инженерно-технических задач в промышленности. Техническое нивилирование выполняется нивилирами и рейками. Техническое нивилирование производят для высотного обоснования топографических съёмок масштаб 1:500, 1 5000 и для определения отметок геологических вырабатак и решения различных инженерных задач. Ходы технического нивилирования могут быть замкнутые и разомкнутые- проложение между двумя реперами, отметки которых извечтны, и висячие, опирающиеся только на один репер с известной отметкой. Длины замкнутых и разомкнутых ходов не должны быть более 15 км а висячие 8 км.
Билет 15
1 способы определения положения точек на местности
Для определения положения точек на местности необходима сеть опорных пунктов с известными координатами. Относительно этих пунктов выполняется съёмка подробностей. Существует следущие способы съёмки подробностей: 1 Способ прямоугольных координат или способ перпендикуляров эффективен для съёмки линейных объектов
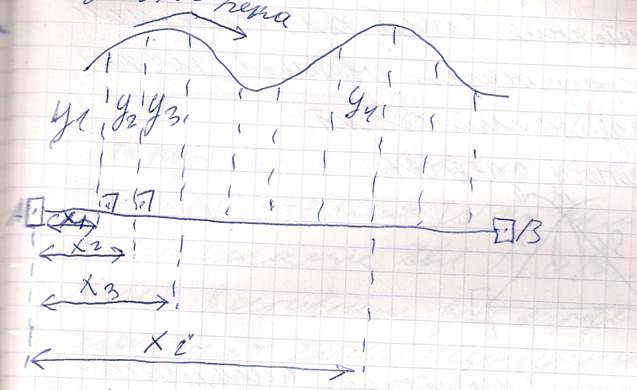
А и B пункты с изсвестными координатами измеряемыми величинами являются х1,х2 х3 хi. расстояние от начало пункта А до основания перепендикуляров и длины перпендикуляров y1 y2 y3 yi
2 способ полярных
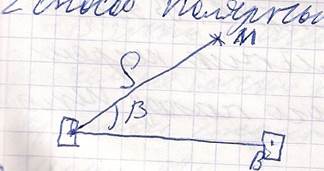
Аи B пункты с известными координатами точки А являются полюсом измеряемые величины бета – поляный угол и S –полярное расстояние. Способ является основным для топографическихсъёмак. Точка М определяемый объект
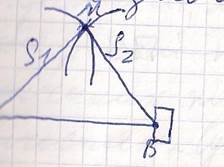
3 линейные засечки Аи B точки с известными координатами М- определяемая точка S1,S2 измеряемые расстояние. Точка М получается на пересечении дуг радиусы которых равны измеренным расстояниям. В геодезии линейные засечки обычно используются с 3-х известных пунктов. В этом случае получается треугольник погрешности в ценре которого находится искомая точка.
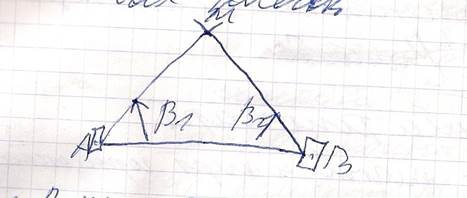
4 Угловая засечка
А и B пункты с известными координатами М – определяемая точка измеряемыми величинами являются бета 1 и бета 2. Применяется в основном для определения положения точек недоступны для непосредственного измерения расстоянием.
2.Оценка точности неравноположенных величин
Каждый и неравноточных результатов характерезуется различной надёжностью которая выражается определённым числом P называемое весом таким образом вес –результат измерения это степень доверяя к нему. В общем виде формула для определения веса P итое=с/m итое где с = const которая выбирается таким образом что бы значение веса было близко к 1 и m итое в квадрате - среднее квадратичное ошибки. Если обозначить через P вес среднего арифметического в n больше веса отдельного результата равноточного измерения P/P=n. В геодезии за веса обычно принимают значения P=C/S, P=C/S в квадрате P= K , где S- длинна S в квадрате- площадь а K число приёмов средне квадратичной ошибки вес которого равен 1. Для системных ошибок M= корень квадратный [P дельта в квадрате]/n.
Билет16
1. Определение углов ориентрования
К углам ориентирования относитс: магнитный азимут обознач. Ам –горизонтальный угол отсчитываемый отсеверного направления магнитного мередиана по часовой стрелки до заданного направления. 2- истинный азимут обознач Аи- горизонтальный угол отсчитываемы от северного направления истинного географического мередиана до задоного направления по часовой стрелки. Магнитный и истинный азимуты определяются астрономиким либо геодезическим методам. Магнитынй азимут возможно определить с помощью любого прибора с магнитной стрелкой. Дирикционный угол отсчитываемый от северного направления осевого меридиана либо от вертикальной линии километровой сетки или линий параллельно ей до заданного направления по часовой стрелки. 0< bили равно Ам, Аи, альфа < равно 360 градусов. В геодезии часто приходится иметь дело с тригонометрическими функциями это одна из причин использования румбов. Румбом называется угол отсчитываемы от ближайшего конца осевого мередиана до заданного направления. Румбы изменяются от 0 градусов≤r≤ 90градусов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.