6. Выбор регулятора при проектировании АСР
г
При выборе регулятора следует определиться с группой регулирующих устройств - непрерывного, релейного или импульсного действия. Такой выбор ориентировочно может быть сделан по величине отношения запаздывания к постоянной времени объекта tAT^:
• при отношении т/Тоб меньше 0.2 целесообразно использовать регулятор релейного действия',
• если отношение т/Т* от 0.2 до 1.0, то нужно использовать регулятор непрерывного действия',
• только при отношении т/Тоб больше единицы можно использовать регулятор импульсного действия.
Затем необходимо определиться с типом регулятора, т.е. выбрать определенный закон регулирования. Так, например, чтобы выбрать тип регулятора непрерывного действия, отрабатывающий П-, И-, ПИ- или ПИД-закон регулирования, необходимо знать динамическую характеристику объекта, а именно, кроме отношения т/Тоб нужно знать еще и коэффициент передачи, для нормированной кривой разгона он равен единице.
Из динамической характеристики объекта имеем:
т = 28с
Тоб=140с
т/Тоб = 28/140 =0.2 (регулятор непрерывного действия)
Из литературных источников, например [5], можно использовать таблицу (см. табл. "Формулы для приближенного расчета регуляторов" в Прилож. 1), в которой рассмотрены три типовых оптимальных процесса регулирования:
а) апериодический переходной процесс с минимальным временем регулирования,
б) переходной процесс со степенью колебательности m = 0.221,
в) переходной процесс, минимизирующий интегрально-квадратичный критерий
качества регулирования.
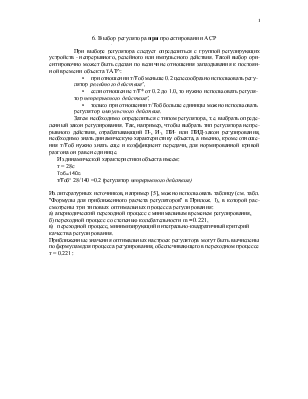
Приближенные значения оптимальных настроек регулятора могут быть вычислены по формулам для процесса регулирования, обеспечивающего в переходном процессе т = 0.221:
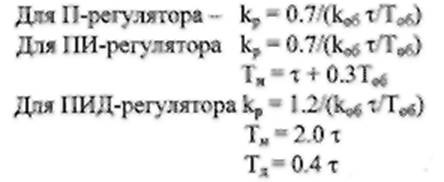
Рассмотрим приведенный ранее пример для объекта
регулирования, имеющего т = Для![]() 1
И-регулятора стартовые параметры настройки будут равны:
1
И-регулятора стартовые параметры настройки будут равны:
![]()
7. Методика моделирования переходного процесса в одноконтурной АСР
Режим моделирования используется для получения переходных процессов в АСР различной структуры. Однако для любого типа АСР работа в данном режиме состоит из следующих этапов [6].
1. Декомпозиция передаточной функции
объекта. Передаточную
функцию объек
та, приведенную к
безразмерному виду, нужно представить как систему, состоящую
из последовательно соединенных типовых элементарных звеньев, например:
Для декомпозиции передаточной
функции объекта регулирования используется весь набор типовых элементарных звеньев, сведенный в
табл. «Кодировка звеньев АСР» (см.
Прилож. 2).
передаточной
функции объекта регулирования используется весь набор типовых элементарных звеньев, сведенный в
табл. «Кодировка звеньев АСР» (см.
Прилож. 2).
2. Подготовка исходной информации. На данном этапе необходимо
выполнить
следующие действия:
• Составить структурную схему алгоритма моделирования переходного процесса в АСР на основе выбранной схемы регулирования. В данной структурной схеме входы и выходы звеньев нумеруются в направлении распространения возмущающих воздействий.
• Создать таблицу звеньев и данных. Таблица состоит из шести строк и содержит число столбцов, равное числу элементарных звеньев в структурной схеме алгоритма моделирования. Столбцы таблицы соответствуют звеньям в структурной схеме, причем порядковый номер звена равен номеру столбца. В первую строку заносятся коды звеньев в соответствии с табл. «Кодировка звеньев АСР», во вторую и третью - номера входных сигналов. Оставшиеся три строки содержат параметры каждого из элементарных звеньев и заполняются в зависимости от типа звена (см. табл. «Кодировка звеньев АСР»).
• Выбрать шаг и время интегрирования. Для обеспечения необходимой точности расчетов шаг интегрирования должен составлять не более одной десятой от значения наименьшей постоянной времени объекта. Время интегрирования в общем случае должно быть в 4-5 раз больше максимальной постоянной времени объекта.
3. Моделирование переходного процесса. Данный этап подробно описан в [6].
4. Оценка переходного процесса. На данном этапе качество регулирования оценивается по следующим критериям:
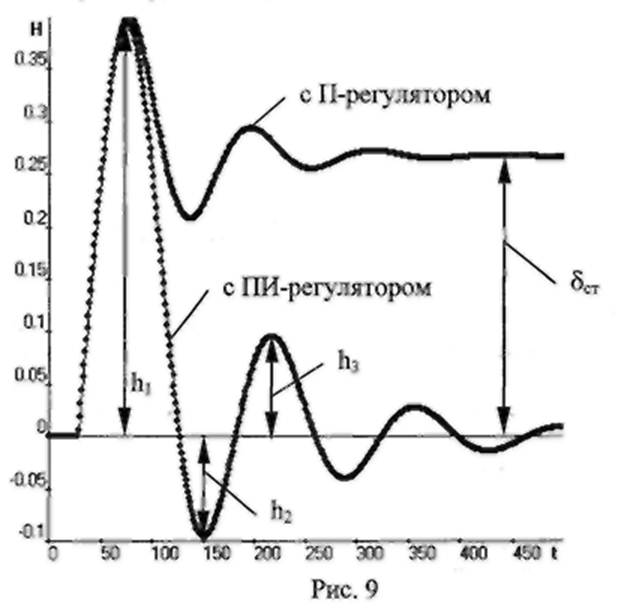 |
• Статическая ошибка регулирования (8С1) характерна для АСР, использующих П- и ПД-регуляторы. В конце процесса регулирования имеет место относительное отклонение РП от заданного значения. Разность между новым установившимся значением регулируемой величины и его заданием определяет значение статической ошибки регулирования. Этот фактор ограничивает применение П- и ПД-регуляторов несмотря на то, что по другим показателям они лучше систем с ПИ- и ПИД-регуляторами.
• Продолжительность переходного процесса - время регулирования tp, охватывающее временной интервал от момента нанесения возмущения до вхождения регулируемого параметра в пятипроцентный коридор. Данный параметр регулирования должен быть по возможности более коротким, т.е. продолжительность переходного процесса должна быть минимальна.
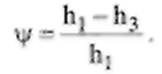
• Степень затухания должна соответствовать выбранной степени колебательности. Степенью затухания \\fназывается отношение разности двух соседних, направленных в одну сторону амплитуд hi и h3, к первой амплитуде h,:
• Интегральный критерий качества
регулирования I представляет собой площадь, ограниченную кривой
переходного процесса и осью времени. При минимизации величины данного критерия
можно получить нулевое значение, при котором система будет находиться на
границе устойчивости, что недопустимо для работы реальной АСР. Поэтому
универсальной оценкой качества регулирования является интегральный квадратичный
критерий I2, учитывающий сумму абсолютных
значений площадей, расположенных выше и ниже оси времени:
и ниже оси времени:
Одновременное удовлетворение всем критериям качества переходного процесса в АСР практически невозможно. Поэтому в зависимости от требований к АСР предпочтение отдается критериям, таким как время регулирования, степень затухания, связанная со степенью колебательности, динамическая погрешность, а также поиск минимума наиболее обобщенного интегрального квадратичного критерия. Рассмотрим процесс моделирования работы одноконтурной АСР на примере объекта регулирования с передаточной функцией:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.