Основные уравнения являются общими для двигателей всех систем возбуждения. При работе машины ток якоря
![]() Ia
= U - Ea (1)
Ia
= U - Ea (1)
∑Ra
где U – напряжение, подводимое к двигателю; Ea - э.д.с. якорной обмотки;
∑Ra - общее сопротивление всей якорной цепи:
∑Ra = Ra + Rв , (2)
Ra , Rв - соответственно сопротивления обмоток якоря и возбуждения.
В начальный момент пуска n = 0, Ea =0 и пусковой ток
![]() Iп = U (3)
Iп = U (3)
∑R
Величина Iп может достигать больших значений, поэтому с целью ограничения последнего в цепь якоря вводят пусковой реостат R1, сопротивление которого постепенно выводится по мере разгона двигателя,
![]() Частота
вращения двигателя последовательного возбуждения n = U - Ia ⋅∑Ra . (4) cE ⋅Ф
Частота
вращения двигателя последовательного возбуждения n = U - Ia ⋅∑Ra . (4) cE ⋅Ф
Рассматриваемый двигатель нельзя пускать в ход при отсутствии тормозного момента на валу, т.к. в этом случае его частота вращения может достигнуть опасных пределов. Это объясняется тем, что при отсутствии нагрузки на валу ток якоря, ток возбуждения и магнитный поток будут малы и двигатель пойдет в “разнос”.
Чтобы этого не произошло, необходимо проверить исправность тормозного устройства и цепи возбуждения тормоза во время пробного пуска.
![]() Так
как в двигателе последовательного возбуждения с ненасыщенной магнитной системой
Ф = c⋅Ia , то с увеличением
нагрузки частота вращения значительно уменьшается n = U - Ia ⋅(Ra + Rв) = U - Ia ⋅(Ra + Rв) . (5) сE ⋅Ф k ⋅Ia
Так
как в двигателе последовательного возбуждения с ненасыщенной магнитной системой
Ф = c⋅Ia , то с увеличением
нагрузки частота вращения значительно уменьшается n = U - Ia ⋅(Ra + Rв) = U - Ia ⋅(Ra + Rв) . (5) сE ⋅Ф k ⋅Ia
Поэтому скоростная характеристика n = f(Ia ) имеет резко падающий вид (рис.18.1).
Момент на валу двигателя пропорционален току и магнитному потоку, т.е.
M = cM ⋅Ia ⋅Ф. (6)
При ненасыщенной магнитной системе Ф ≡ Ia , а поэтому
M ![]() .е. характеристика
M = f(Ia )
приближается к параболе (рис. 18.2). Способность этих двигателей развивать значительные
вращающие моменты, особенно при пуске, определяет область их применения: в подъемно-транспортных
устройствах, в качестве крановых двигателей и тяговых двигателей на транспорте.
.е. характеристика
M = f(Ia )
приближается к параболе (рис. 18.2). Способность этих двигателей развивать значительные
вращающие моменты, особенно при пуске, определяет область их применения: в подъемно-транспортных
устройствах, в качестве крановых двигателей и тяговых двигателей на транспорте.
Регулирование частоты вращения и реверсирование у двигателя последовательного возбуждения производятся такими же способами, как и у двигателей параллельного возбуждения, т.е. изменением U, ∑Ra и Ф.
Свойства двигателя последовательного возбуждения определяются его рабочей (рис. 18.1) и механической (рис 18.2) характеристиками.
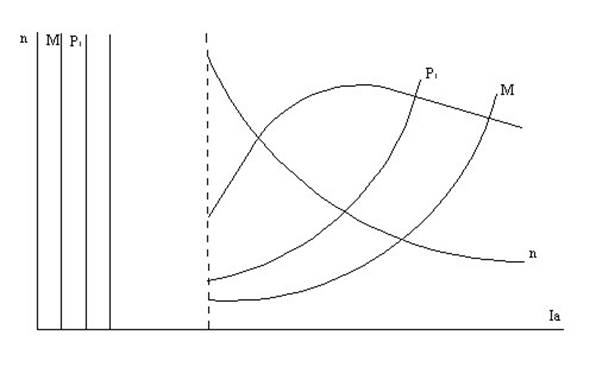
Рис 18.1. Рабочие характеристики двигатели.

Рис 18.2. Механическая характеристика двигателя.
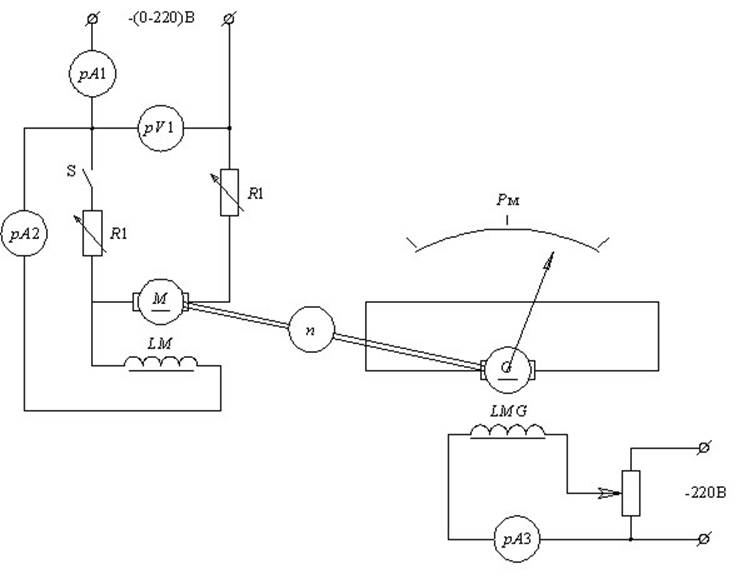
Рис. 18.3. Схема испытания двигателя постоянного тока последовательного возбуждения.
На схеме:
M – испытуемый электродвигатель МСП-01 (![]() =150
Вт;
=150
Вт; ![]() =1,8A;
=1,8A;
![]() =160В;
n=1500об/мин);
=160В;
n=1500об/мин);
G – нагрузочный генератор на базе электродвигателя ПЭЛ-
![]() 72( =120 Вт;
72( =120 Вт; ![]() =1,3A;
=1,3A;
![]() =220В;
n=1400об/мин);
=220В;
n=1400об/мин);
- амперметр М309 2А 1,5%;
- амперметр М309 2А 1,5%;
- амперметр М309 1А 1,5%;
- вольтметр М367 220В 1,5%;
- реостат 100 Ом;
- реостат 200 Ом;
- реостат 500 Ом;
- моментомер, Нм; n - тахометр, об/мин.
Меры предосторожности: не допускайте уменшение
тока возбуждения электродвигателя меньше ![]() ) во избежание работы электродвигателя «вразнос»!
Предварительно необходимо подключить обмотку возбуждения генератора LMG к
сети и убедиться в наличии тока. Проверьте полярность подключения приборов.
) во избежание работы электродвигателя «вразнос»!
Предварительно необходимо подключить обмотку возбуждения генератора LMG к
сети и убедиться в наличии тока. Проверьте полярность подключения приборов.
Внимание: при выполнении опытов напряжение якорной цепи испытуемого двигателя поддерживайте постоянным.
18.3.1. Соберите схему испытания электродвигателя (рис. 18.4).
18.3.2. Подав вначале напряжение на обмотку возбуждения нагрузочного генератора (LMG), убедитесь в наличии тока в ней, а затем, подав напряжение на испытуемый электродвигатель и плавно увеличивая его, произведите пробные пуск. Убедитесь в правильности вращения (тахометр вращается по часовой стрелке), а также в наличии нагрузки (отклонение стрелки моментомера). Работа на холостом ходу недопустима. Отключите установку от сети.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.