МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ
ГОМЕЛЬСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ ИМЕНИ П.О.СУХОГО
Факультет автоматизированных и информационных систем
Кафедра «Автоматизированный электропривод»
РАСЧЁТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
по дисциплине «Теория электропривода»
на тему: «ЭЛЕКТРОПРИВОД СТОЛА
ПРОДОЛЬНО-СТРОГАЛЬНОГО СТАНКА»
Исполнитель: студент гр. ЭП-41
Руководитель:
Дата проверки: ___________________
Дата допуска к защите: ___________________
Дата защиты: ___________________
Оценка работы: ___________________
Подписи членов комиссии по защите курсовой работы: _________________________________
Гомель 2010
СОДЕРЖАНИЕ
Введение…………………………………………………………………………
1. Технологическое описание механизма…………………………………...
2. Диаграммы скорости и статических нагрузок……………………………
3. Выбор системы электропривода и электродвигателя……………………
4. Скоростная и упрощённая нагрузочная диаграммы электропривода…..
5. Проверка электродвигателя………………………………………..............
6. Выбор оборудования и расчёт параметров электропривода…………….
7. Статические характеристики……………………………………………...
8. Анализ переходных процессов……………………………………………
9. Окончательная проверка электродвигателя……………………………...
10. Энергетика электропривода……………………………………………….
11. Схема управления………………………………………………………….
Заключение……………………………………………………………………...
Список литературы……………………………………………………..............
Введение
Широкое внедрение комплексной механизации и автоматизации производственных процессов, неуклонное сокращение во всех отраслях численности работников, занятых ручным трудом, особенно на вспомогательных и подсобных работах, являются одной из важнейших задач народного хозяйства.
В данном курсовом проекте требуется разработать электропривод стола продольно-строгального станка. Проектирование системы электропривода производственного механизма требует решение следующих задач: выбор системы электропривода и электродвигателя, выбор оборудования и расчёт параметров, расчёт энергетики для формирования требуемых статических и динамических характеристик.
1. Технологическое описание механизма
На основании задания на курсовое проектирование [1] к расчету принята кинематическая схема механизма, изображенная на рис.1.
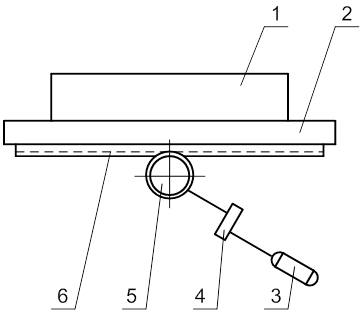
Рис.1. Кинематическая схема главного привода продольно-строгального станка:
1 – деталь; 2 – стол; 3 – электродвигатель;
4 – редуктор; 5 – реечная шестерня; 6 – зубчатая рейка.
Масса стола с заготовкой mс = 3520 кг; длина обрабатываемой поверхности lз = 4,8 м; сила резания F = 17 кН; рабочая скорость прямого хода стола υр = 42 м/мин; скорость резания максимальная υр max = 75 м/мин; скорость обратного хода стола υ0 = 80 м/мин; шаг реечной шестерни t = 12 мм; передаточное число редуктора iр = 4,84; КПД редуктора ηр = 0,96; коэффициент трения в направляющих стола μ = 0,055; длинна хода стола LС = 5 м; момент инерции ЭД JД = 0,23 кг*м2; жесткость вала реечной шестерни сВ = 5,32*107 Н*м/рад; приведенный момент вращающихся масс JВМ = 0,116 кг*м2; число зубьев реечной шестерни Z = 11
2. Диаграмма скорости и статических нагрузок
Радиус приведения механизма:
где t = 12 мм – шаг реечной шестерни;
Z = 11 – число зубьев реечной шестерни;
iр = 4,84 – передаточное число редуктора;
Усилие при прямом ходе стола:
Fпр = F + µ·mст·g = 17000 + 0,055·3520·10 = 18940 Н.
где F = 17 кН – сила резания;
µ = 0,055 – коэффициент трения в направляющих стола;
mс = 3520 кг – масса стола с заготовкой.
Усилие при обратном ходе стола:
Fo = µ·mст·g = 0,055·3520·10 = 1936 Н.
Статический момент при прямом ходе стола:

где ηр = 0,96 – КПД редуктора.
Статический момент при обратном ходе стола:

Расчетная длина перехода стола:
Δl = LC - LЗ = 5 - 4,8 = 0,2 м где LЗ = 4,8 м – длина обрабатываемой поверхности;
LC = 5 м – длинна стола.
Линейные скорости на каждом участке работы:
– рабочая скорость прямого хода стола υр = 42 м/мин = 0,7 м/с;
– пониженная скорость υпон = 0,2* υр =8,4 м/мин = 0,14 м/с;
– скорость обратного хода стола υо = 80 м/мин = 1,33 м/с.
Время прямого хода:
Время движения на пониженной скорости:
Время обратного хода:
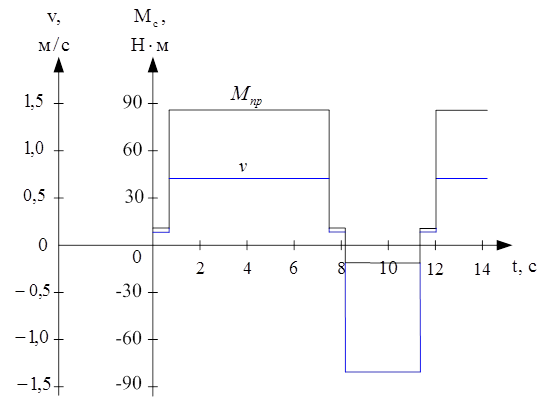
Рис.2. Диаграмма скорости и статических нагрузок.
3. Выбор системы электропривода и предварительный выбор электродвигателя
Выбираем систему электропривода: тиристорный преобразователь – двигатель.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.