Ток и момент стопорения:
Iст=2,5∙ Iн=2,5 ∙80,362=200,9А;
Мст=3∙ Мн =3∙105,973 =317,919 Н∙м;
При 15% момент уставки:

Скорость идеального х.х. при Uзс.max = 10 B составляет 333,66 рад/с;
При моменте уставки:

Сигнал
задания скорости при резании: 
Скорость идеального х.х. для характеристики фрезерования:

Коэффициент ОС по току:

Статизм характеристики резания замкнутой системы:

Рассчитанный статизм замкнутой системы для характеристики фрезерования соответствует требованиям.
Статические характеристики замкнутой системы представлены на рис. 6.
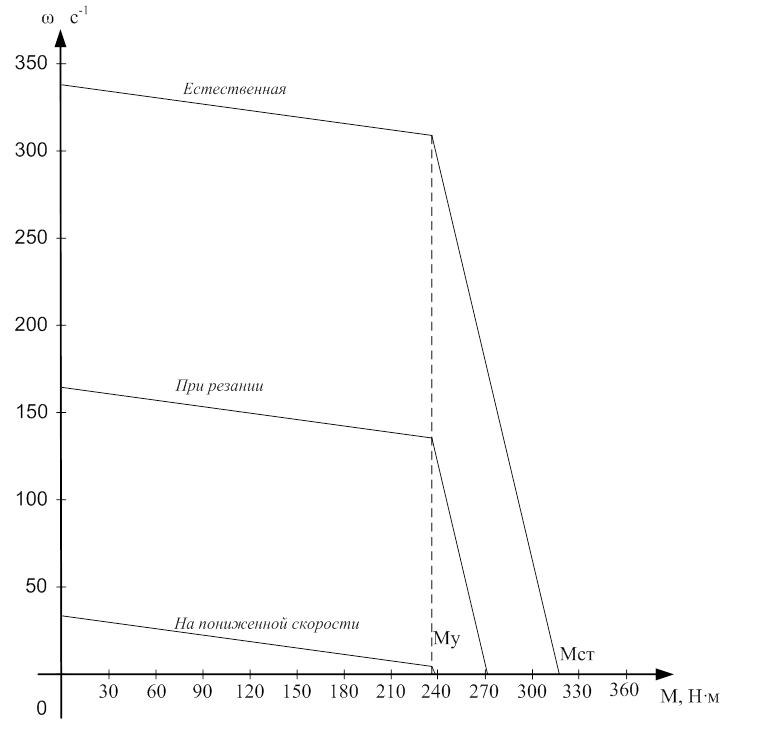
Рис. 6. Статические характеристики замкнутой системы.
8. Расчет и анализ переходных процессов за цикл работы.
При расчете переходных процессов следует учитывать следующее: сигналы устройств в расчетах не должны превышать допустимые уровни физических устройств (для регуляторов это ±10 В). Поэтому необходимо при моделировании предусматривать узлы ограничения уровней сигналов или выбирать соответствующий уровень воздействий (задания или возмущения). При аналитических расчетах, как показывает опыт, отсутствие узлов ограничения не приводит к существенной погрешности.
При кусочно-линейной аппроксимации нелинейных характеристик расчет динамических процессов ведется по этапам на каждом линейном участке с контролем над значением переменной, определяющей окончание участка. На каждом этапе составляются дифференциальные уравнения, определяются корни, находятся аналитические решения с учетом начальных и установившихся значений. Система дифференциальных уравнений, описывающих систему:
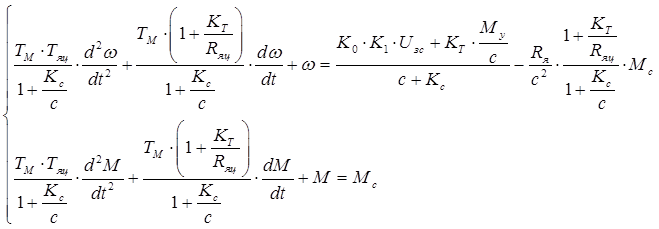
Правые части уравнений представляют собой установившиеся значения переменных. Корни характеристического уравнения системы:
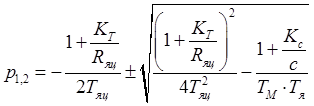
Вид аналитических решений уравнений системы определяется характером корней характеристического уравнения: комплексные либо вещественные. Процесс пуска происходит в несколько этапов, определяемых значениями тока якоря и момента.
Переходные процессы разомкнутой системы.
Переходной процесс пуска до пониженной скорости. Он проходит в 2 этапа:
1
этап. M![]() Mc = 102 Н∙м. Протекает электромагнитный процесс. При этом якорь неподвижен
(ω=0).
Mc = 102 Н∙м. Протекает электромагнитный процесс. При этом якорь неподвижен
(ω=0).
Данные для расчёта:
Тя=0,00803 с, Тм=0,013с, К0=20,033, К1=12,7, Uзс=9,195 В, с=1,319, Rя=0,065 Ом, Мс=262,284 Н∙м, J=0,346 кг∙м2, ωс=35 рад/с,
КТ= К0Т∙ К0=39,96.
Момент короткого замыкания:

Дифференциальное уравнение:
Решение имеет вид:

Первый этап длится до тех пор, пока момент не превысит значение статического момента. График переходного процесса представлен на рис. 7.
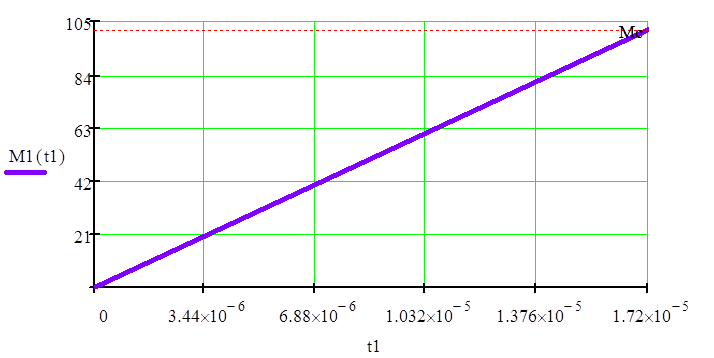
Рис. 7. Первый этап переходного процесса.
Время переходного процесса: t1 = 0.000017c; значение момента в конце первого этапа: M = Mc = 105 Н∙м.
2 этап. Начало электромеханического переходного процесса, ротор начинает раскручиваться.
Начальные значения:
Установившиеся значения:
Система дифференциальных уравнений для скорости и момента:
Характеристическое уравнение:
![]() (7.7)
(7.7)
Корни характеристического уравнения:

Решение ищем в виде:
Найдем производные:
Решаем уравнения и относительно коэффициентов A,B,C,D для момента времени t = 0 с учетом начальных условий получаем следующую систему:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.