2.1. Описание единым методом процесса планирования и управления (однородный метод).
2.2. Описание процессов планирования и управления различными методами с последующей стыковкой (интегральный метод).
Для описания процессов планирования и управления используется:
1. Статическое линейное программирование (СЛП).
2. Квадратичное программирование.
3. Динамическое линейное программирование (ДЛП).
25.) Задачи ЛКО: управление по состоянию, по выходу, следящая система.
Будем описывать объект управления методом пространства состояний. Управление по состоянию имеет вид:
 выразить через управление по выходу.
выразить через управление по выходу.
Следящая система с обратной связью:
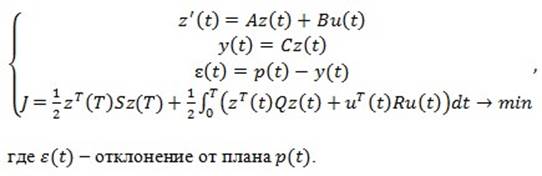
Недостаток квадратичного критерия – неопределённые
размерности (![]() ).
).
26.) Интегральный метод. Описание планирования без учета и с учетом специфики уровней.
Описание планирования без учета специфики уровней:
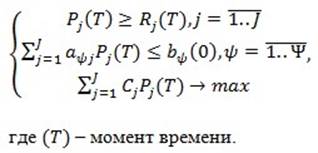
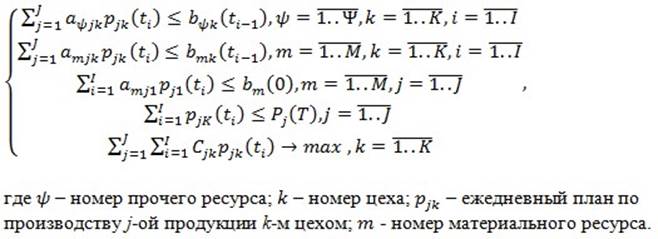
Пусть i – день, T – месяц.
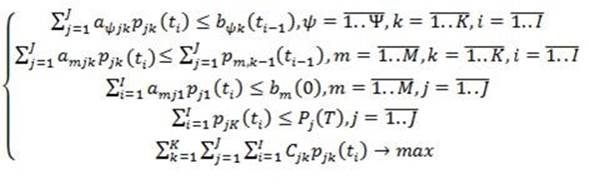
Описание планирования для уровня цехов h = 1 имеет вид:
Описание планирования для уровня диспетчера h = 2 имеет вид:
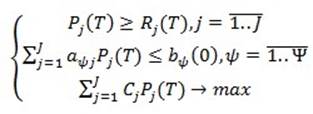
Описание планирования для уровня предприятия h = 3 имеет вид:
Недостатки интегрального метода таковы:
1. Неучёт нелинейности в процессе управления.
2. Трудность экономической трактовки квадратичного критерия.
3. Сложные зависимости между векторными свойствами элементов.
27.) Согласование элементов в процессе планирования по экономическому интересу.
Согласование (по экономическому интересу) – согласование по целевой функции.
Две задачи статического линейного программирования считаются согласованными по экономическому интересу, если:
1. Области ограничений либо совпадают, либо одна входит в другую.
2. Тенденции (монотонность) изменения целевых функций совпадают.
В согласовании системы выделяются две группы: горизонтальное согласование (уровень h
= 2) и вертикальное: вариант «а» - согласование h = 1 и h = 2, вариант «б» - согласование h = 2 и h = 3.
Будем считать, что h = 2 - согласован.
Согласование h = 1 и h = 2 следует из описания этих уровней.
Уровни h = 2 и h = 3 согласованы.
□
Доказательство:
Следовательно, область ограничений для h = 2 входит в область ограничений для h = 3.
Тенденции изменений целевых функций совпадают. Следовательно, уровни h = 2 и h = 3 согласованы.
■
28.) Информационная неопределенность в описании процесса управления.
 |
Информационная неопределённость частично устраняется результатами беседы с руководителем по схеме: «Ваше подразделение не выполнило план за прошлый день и с начала месяца – ваши действия?». Руководитель отвечает по схеме «Если …, то ….», которая может быть трансформирована в математическое описание с помощью имитационных моделей. Существует до десятка разновидностей таких моделей, из которых мы используем динамическую имитационную модель (ДИМ).
29.) Динамическая имитационная модель.
Динамическая имитационная модель представляет собой совокупность элементов и связывающих их потоков (сетей). Специфическими элементами являются решающие элементы. Выделяются следующие сети: материальных ресурсов, оборудования, трудовых ресурсов, финансов, планов (заданий).
Специфической сетью является информационная сеть, начинающаяся на перечисленных выше сетях и заканчивающаяся в решающих элементах.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.