Так как подключаемая соединительная линия к приемнику является двухпроводной, то необходимо согласующее устройство (СУ) для перехода с двухпроводного окончания в четырехпроводное. Также данное СУ выполняет согласование по электрическим уровням сигналов линии и системы.
Приемник имеет связь с управляющим устройством (УУ) АТС-А. Т.к. физические и логические уровни сигналов МПС совпадают с сигналами УУ, то согласующего устройства не требуется.
Структурная схема приемника двухсигнальных частот многочастотной сигнализации представлен на рисунке 2.2.
Определим сразу же важные моменты в структурной схеме, которые необходимы будут при разработке ПО: связь МПС с УУ АТС-А осуществляется по последовательному порту (SPORT) и линии внешнего прерывания (IRQ2). Также будем использовать внутренние прерывания от АЦП (ADC) и SPORT. В качестве сигнального процессора будет использован ADSP 21msp58, в котором уже реализован аналоговый интерфейс.
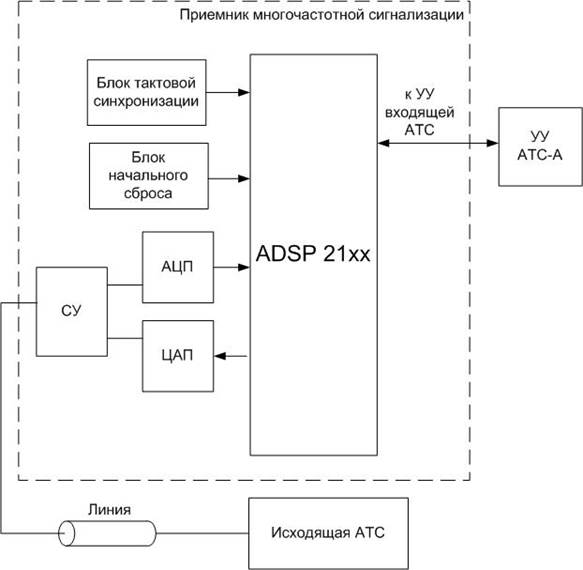
Рисунок 2.2 – Структурная схема приемника
Электрические параметры сигналов, используемых в линии и в микропроцессоре, а также напряжения питания МПС представлены в таблице 2.1.
Таблица 2.1 – Электрические характеристики
|
минимум |
максимум |
|
|
Напряжение питания процессора, В |
4.5 |
5.5 |
|
Высокий уровень входного сигнала, В |
2.0 |
|
|
Низкий уровень входного сигнала, В |
0.8 |
|
|
Высокий уровень выходного сигнала, В |
2.4 |
|
|
Низкий уровень выходного сигнала, В |
0.4 |
|
|
Напряжение сигнала в линии, В |
5.0 |
3 РАЗРАБОТКА ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
Прежде чем составить программу для решения на МПС, какой либо задачи, необходимо разработать ее алгоритм – точное предписание, определяющее вычислительный процесс, ведущий от варьирующих начальных данных к искомому результату. Составление алгоритма необходимо для облегчения разработки программы и ее отладки. Высокое качество программы достигается в первую очередь за счет глубокой проработки схемы алгоритма на этапе проектирования. Это в первую очередь безошибочность программы, уверенность программиста в том, что она не содержит ошибок. Уверенность в безошибочности программы определяется ясностью и простотой, читаемостью и легкости интерпретации ее автором и другими программистами.
3.1 Составление схем алгоритма работы
При разработки ПО будем использовать принцип модульности, т.е. использование подпрограмм. Имеется одна основная программа (main) и 7 основных подпрограмм:
1) on – подпрограмма включение приемника от сигнала УУ. Вызов ее осуществляется прерыванием по IRQ2;
2) sport – подпрограмма приема информации от УУ по последовательному порту. Вызов ее осуществляется по прерыванию от SPORT;
3) adc - подпрограмма приема информации с линии по аналоговому интерфейсу. Вызов ее осуществляется по прерыванию от ADC;
4) dac – служебная подпрограмма, необходима для ЦОС – цифро-аналоговое преобразования сигнала и выдача его в линию;
5) r_adc – служебная подпрограмма, необходима для ЦОС – приема сигнала с линии и аналого-цифровое преобразования этого сигнала;
6) r_sport – служебная подпрограмма, необходима для приема информации с SPORT;
7) t_sport – служебная подпрограмма, необходима для передачи информации по SPORT;
Служебные подпрограммы могут иметь свои собственные подпрограммы, например dac имеет подпрограмму sin и serv, для выработки непосредственной синусоиды.
Основная программа (рисунок 3.1) main начинается с инициализации (блок 0). И переходит в ожидание включения (1). По приходу прерывания по IRQ2 вызывается подпрограмма on, после выполнения которой система вновь входит в состояние ожидния (2). В этом случае, в зависимости от чего придет прерывание (от SPORT, либо ADC) вызовется подпрограмма sport или adc. После выполнения подпрограммы система определяет имело ли место приход с линии сигнала А12 – прием подтверждения, если да то система вновь переходит к инициализации, если нет то система переходит в режим ожидания ответа (2).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.