Введём в рассмотрение коэффициент конструкции, учитывающий момент неуравновешенности масс подвижных звеньев исполнительного устройства в зависимости от конструкции степени подвижности ПР, её удаление от основания и типа привода:
С учётом этого коэффициента момент от неуравновешенности масс можно записать:
![]()
Для
неуравновешенного механизма ![]()
Величина динамического момента определяется по формуле:
![]()
Момент инерции вращающихся звеньев исполнительного устройства робота и объекта манипулирования определяется по выражению:

где ![]() – момент инерции объекта
манипулирования при максимальном радиусе действия;
– момент инерции объекта
манипулирования при максимальном радиусе действия;
![]() - момент инерции вращающихся
звеньев исполнительного устройства робота.
- момент инерции вращающихся
звеньев исполнительного устройства робота.
Величина момента инерции объекта манипулирования определяется по формуле:
![]()
Введём коэффициент конструкции робота:
Окончательно
выражение для нахождения ![]() примет вид:
примет вид:
![]()
Величина
коэффициента конструкции ![]() для современных роботов составляет
для современных роботов составляет ![]()
Угловое ускорение определяется по формуле:
Получаем окончательное выражение для динамического момента:

В итоге момент сопротивления привода равен:

При движении вдоль горизонтальной оси звена, расположенного в горизонтальной плоскости α=0, и выражение для момента сопротивления принимает вид:

Используя данные
из расчёта пневмоцилиндра и его габаритные размеры, определённые по ГОСТ
15608-81, находим расстояние от центра масс до объекта манипулирования ![]()
Угловую скорость и угол поворота берём из техзадания на модуль поворота:
![]()
Момент сопротивления равен:

Определение размеров поперечного сечения стержней схвата заключается в расчёте её на прочность.
Захватное устройство подвержено действию изгибающего момента, а также из-за неуравновешенности масс звеньев и объекта манипулирования.
Основным фактором, влияющим на прочностные характеристики направляющей, является материал, из которого она изготовлена. От выбора материала зависит значение допускаемого напряжения при изгибе.
Выберем материал направляющей - Сталь 3. Для данной стали значение допускаемого напряжения при изгибе равно:
![]()
Значение действующего напряжения при изгибе должно быть меньше допускаемого напряжения:
![]()
Действующее напряжение при изгибе определяется по формуле:

где ![]() - изгибающий момент в поперечном
сечение звена. В данном модуле
- изгибающий момент в поперечном
сечение звена. В данном модуле ![]()
![]() - момент сопротивления сечения
изгибу.
- момент сопротивления сечения
изгибу.
Выберем сечение, представленное на рисунке 4.

Рисунок 4 – Сечение призматической направляющей
Для данного сечения момент сопротивления изгибу равен:

Напряжение при изгибе равно:

Исходное неравенство примет вид:

Находим геометрические размеры поперечного сечения:

![]() =>
=> ![]()
Возьмем сторону с
запасом ![]()
Определение размеров поперечного сечения ОПОРЫ ДЛЯ ГУБОК заключается в расчёте её на прочность.
Модуль горизонтального выдвижения руки подвержен действию изгибающего момента, который возникает из-за вращающего действия модуля поворота, а также из-за неуравновешенности масс звеньев и объекта манипулирования.
Основным фактором, влияющим на прочностные характеристики направляющей, является материал, из которого она изготовлена. От выбора материала зависит значение допускаемого напряжения при изгибе.
Выберем материал направляющей - Сталь 43. Для данной стали значение допускаемого напряжения при изгибе равно:
![]()
Значение действующего напряжения при изгибе должно быть меньше допускаемого напряжения:
![]()
Действующее напряжение при изгибе определяется по формуле:
где ![]() - изгибающий момент в поперечном
сечение звена. В данном модуле
- изгибающий момент в поперечном
сечение звена. В данном модуле ![]()
![]() - момент сопротивления сечения
изгибу.
- момент сопротивления сечения
изгибу.
Выберем сечение, представленное на рисунке 4.
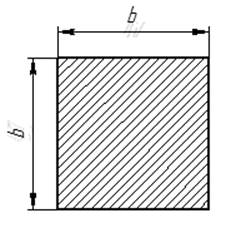
Рисунок 4 – Сечение призматической направляющей
Для данного сечения момент сопротивления изгибу равен:
Напряжение при изгибе равно:

Исходное неравенство примет вид:
Находим геометрические размеры поперечного сечения:

![]() =>
=> ![]()
Выберем сторону с запасом ![]()
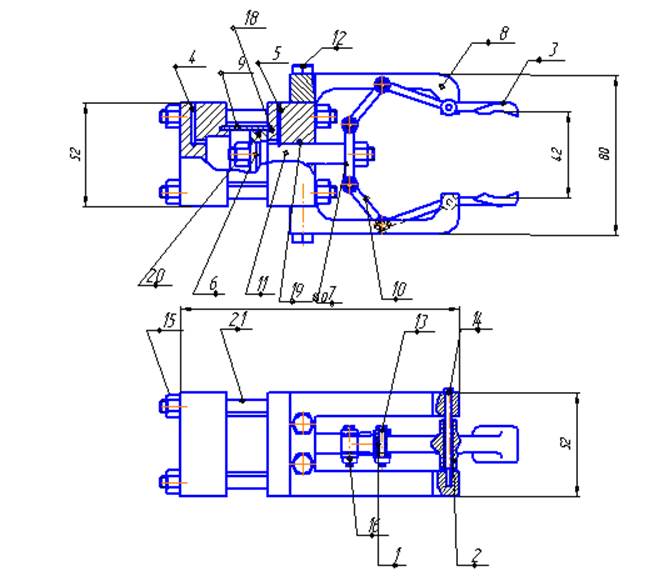
1. Втулка стержня
2. Втулка схвата
3. Губки
4. Крышка цилиндра левая
5. Крышка цилиндра правая
6. Поршень
7. Опора для стержней
8. Опора для губок
9. Цилиндр
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.