А=К+Ан+Атр, где К— кинетическая энергия, сообщаемая перемещаемой массе;
Ан — работа по преодолению нагружающей силы; Атр — работа по преодолению сил трения.
Кинетическая энергия есть
где V - скорость поршня в конечный момент времени. Для оценк значения скорости будем полагать, что в первом приближении скорость поршня нарастает равномерно за время движения поршня.
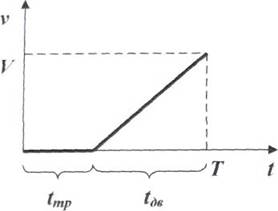
За время движения поршня tдв не тождественно заданному времени срабатывания привода Т. В действительности
T= tmp + tдв
где tmp — время трогания, проходящее от момента включения двигателя до момента начала движения поршня. Время трогания обычно составляет (0,1...... 0,3)Т. Пусть tmp =0,2∙Т = 0,2∙1 = 0,2c.
Далее находим
tдв = Т - tmp =1-0,2 = 0,8с,
 м/с,
м/с,
 Дж.
Дж.
Работа по преодоления сил нагрузки Ан есть
Полагая FH=const, находим
![]() Дж.
Дж.
Найдем работу по преодолению сил трения Атр, полагают, что в рационально спроектированном приводе работа по преодолению сил трения не превышает 10% от суммарной работы, идущей на разгон приведенной массы и преодоление сил нагрузки, т.е можно считать, что
Атр = 0,2 * АН = 0,2 * 0.195 = 0,039Дж
Следовательно
А = Ан + Атр =0,195 + 0.039 = 0.234 Дж.
Отсюда  = 0.234
Вт
= 0.234
Вт
Найденная мощность — это мощность на выходе привода. Для того, чтобы привод выдал на выходе такое значение мощности необходимо подать на его вход и пропустить через привод поток газа, несущий мощность, превышающий найденное значение N, с учетом КПД двигателя.
Найдем значение мощности, которое необходимо подать на вход пнев-модвигателя. КПД пневмопривода составляет несколько процентов и лежит в пределах 5-10%.
Поэтому Nвх =(10...20)N, примем Nвx=20N, тогда
Nвх =20 ∙0.234 = 4.68 Вт.
Для пропускания через двигатель газового потока мощностью Nвx необходимо обеспечить достаточную площадь проходных сечений магистрали, через которую протекает воздух.
Мощность газового потока, протекающего через отверстие площадью S
Nвх=K(Sp)v, где К =(1,5-2) - коэффициент, зависящий от показателя адиабаты и режима течения газа.
v≈340м/с - скорость течения газа при критическом режиме течения (скорость звука).
р — давление газа. Для промышленной пневмосети
p = (4-6)∙105 Н/м2.
Значит
Nвх ≈ (3∙108∙S) Bт , и тогда
![]() =
300 Вт / мм2.
=
300 Вт / мм2.
Для пропускания через пневмопривод мощности Nвх необходимо выбрать площадь сечения питающей магистрали S из соотношения

Площадь канала наполнения Sвх делают на порядок больше, чем Sвых. для обеспечения надежного регулирования скорости выходного звена и, следовательно, времени срабатывания привода.
Поэтому пусть Sвх =10* S, тогда
Sвх =10* S =1.56 мм2.
Величину Fmp можно найти из уравнения ATP=FTP∙ X, отсюда
 тогда
тогда
Fдв=13 + 15.6 = 28.6 Н
Площадь поршня найдем из равенства
![]() ∆p , где
∆р — перепад давлений на поршне.
∆p , где
∆р — перепад давлений на поршне.
В процессе движения перепад давлений в полостях двигателя составляет (20-50)% от давления в питающей магистрали, т.е.
∆р=(0,2...0,5)Рн
Пусть ∆р =0,2*Рн, а т.к. Рн = 5∙105 Н∕м2 получим
∆р =1∙105 Н/м2, тогда
 м2
м2
При конструировании привода по Sвх выбирают пневмораспределитель с соответствующим диаметром условного прохода:
По Sn рассчитывается диаметр поршня из следующего уравнения
Пусть
dшт = 0,4*dп, то есть Sn = (1 - 0,42) =
0,66-d2п,
(1 - 0,42) =
0,66-d2п,
 тогда
тогда
Полученные значения округляются до ближайшего в большую сторону по ГОСТ 6540–68.
Таким образом, исходя из ряда стандартизированных значений {8,10,12,16,20,25,32,40,50,63,80,100,125,160,200,250,320,360,400}mm
![]() ,
,
{4,6,8,10,12,16,25,32,40,50,63,80,90,10} mm
![]() ,
,
{1,3;1,5;2,5;3;4;5;7;13;14}.mm
![]() .
.
Момент
сопротивления привода ![]() складывается из момента
сопротивления от неуравновешенности масс звеньев и объекта манипулирования
складывается из момента
сопротивления от неуравновешенности масс звеньев и объекта манипулирования ![]() и динамического момента
и динамического момента ![]() , возникающего в периоды разгона и
торможения этих же звеньев и объекта манипулирования:
, возникающего в периоды разгона и
торможения этих же звеньев и объекта манипулирования:
![]()
Момент сопротивления от неуравновешенности масс определяется по формуле:
![]()
где ![]() – расстояние от оси вращения
рассматриваемой системы до центра масс звена робота с объектом манипулирования.
– расстояние от оси вращения
рассматриваемой системы до центра масс звена робота с объектом манипулирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.