где ![]() –
момент инерции объекта манипулирования при максимальном радиусе действия;
–
момент инерции объекта манипулирования при максимальном радиусе действия;
![]() - момент инерции вращающихся звеньев исполнительного устройства робота.
- момент инерции вращающихся звеньев исполнительного устройства робота.
Величина момента инерции объекта манипулирования определяется по формуле:
![]()
Введём коэффициент конструкции робота:
Окончательно
выражение для нахождения ![]() примет
вид:
примет
вид:
![]()
Величина
коэффициента конструкции ![]() для
современных роботов составляет
для
современных роботов составляет ![]()
Угловое ускорение определяется по формуле:
Получаем окончательное выражение для динамического момента:
В итоге момент сопротивления привода равен:

При вращении вокруг вертикальной оси звена, расположенного в горизонтальной плоскости α=0, и выражение для момента сопротивления принимает вид:

Используя данные
из расчёта пневмоцилиндра и его габаритные размеры, определённые по ГОСТ
15608-81, находим расстояние от оси вращения до объекта манипулирования ![]()
Угловую скорость и угол поворота берём из техзадания на модуль поворота:


Момент сопротивления равен:

Определение размеров поперечного сечения призматической направляющей заключается в расчёте её на прочность.
Модуль горизонтального выдвижения руки подвержен действию изгибающего момента, который возникает из-за вращающего действия модуля поворота, а также из-за неуравновешенности масс звеньев и объекта манипулирования.
Основным фактором, влияющим на прочностные характеристики направляющей, является материал, из которого она изготовлена. От выбора материала зависит значение допускаемого напряжения при изгибе.
Выберем материал направляющей - Сталь 40. Для данной стали значение допускаемого напряжения при изгибе равно:
![]()
Значение действующего напряжения при изгибе должно быть меньше допускаемого напряжения:
![]()
Действующее напряжение при изгибе определяется по формуле:
где ![]() -
изгибающий момент в поперечном сечение звена. В данном модуле
-
изгибающий момент в поперечном сечение звена. В данном модуле ![]()
![]() -
момент сопротивления сечения изгибу.
-
момент сопротивления сечения изгибу.
Выберем сечение, представленное на рисунке 4.
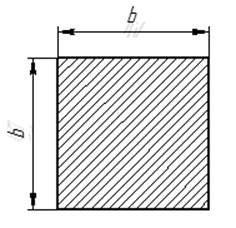
Рисунок 4 – Сечение призматической направляющей
Для данного сечения момент сопротивления изгибу равен:

Напряжение при изгибе равно:
Исходное неравенство примет вид:
Находим геометрические размеры поперечного сечения:
![]() =>
=>
![]()
Исходя из
определенного ранее с помощью геометрических и функциональных соотношений
размера ![]() ,
примем с запасом
,
примем с запасом ![]()
При подаче сжатого воздуха через пневмоклапан, воздух поступает в правую камеру (б) пневмоцилиндра, представленного на рисунке 6.
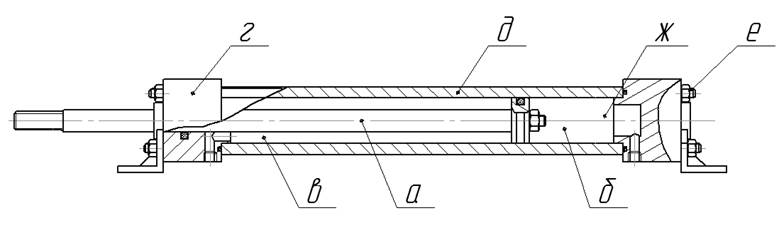
Рисунок 6 - Пневмоцилиндр
В результате разностей давлений в камерах, происходит движение поршня (ж) внутри цилиндрической гильзы (д) справа налево, т.е. обеспечивается выдвижение штока (а), вспомогательной направляющей руки робота. Одновременно с этим воздух из левой камеры (в) стравливается с атмосферой. Поршень обязательно должен иметь уплотнительное кольцо для обеспечения невозможности контакта сжатого воздуха в левой и правой камерах.
Для обеспечения реверсивного хода, т.е. возврата руки робота в исходное положение, необходимо переключить пневмораспределитель. В этом случае воздух будет поступать в левую камеру. В тоже время правая камера будет стравливаться с атмосферой, и поршень будет совершать движение в обратном направлении.
Герметизация гильзы производится крышками (г), которые уплотняются кольцами и крепятся шпильками (е). В крышках выполняются отверстия для подключения к пневмомагистрали.
Для обеспечения прямолинейности движения руки используется призматическая направляющая. Сечение призматической направляющей – квадрат, обеспечивает удобство изготовления и дальнейшей установки и смены направляющей. Углы квадрата обязательно скругляются для обеспечения отсутствия заклинивания.
Призматическая направляющая закреплена в опоре качения, представленной в разрезе на рисунке 7.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.