4.1. Определение потребляемой мощности пневмоцилиндра. 16
4.2. Определение параметров линии пневмопитания. 18
4.3. Оценка величины движущей силы сопротивления. 19
4.4. Выбор площади поршня. 20
4.5. Определение конструктивных размеров. 21
5. ОПРЕДЕЛЕНИЕ МОМЕНТА СОПРОТИВЛЕНИЯ ПРИВОДА.. 23
6. ОПРЕДЕЛЕНИЕ РАЗМЕРОВ ПРИЗМАТИЧЕСКОЙ НАПРАВЛЯЮЩЕЙ.. 27
7. ТЕХНИЧЕСКОЕ ОПИСАНИЕ МОДУЛЯ.. 30
8. СИСТЕМА УПРАВЛЕНИЯ МОДУЛЕМ... 34
8.1. Пневматическая схема модуля. 34
8.2. Описание работы пневмосистемы.. 36
9. УНИФИКАЦИЯ ПОВЕРХНОСТЕЙ.. 38
10. ВЫБОР МАТЕРИАЛОВ.. 40
ЗАКЛЮЧЕНИЕ.. 42
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ... 43
Расчет модуля линейного перемещения включает в себя следующие пункты:
- определение сил и моментов сопротивления привода
- расчет пневмоцилиндра и параметров питающей магистрали
- расчет основных параметров направляющих
Для расчета необходимы следующие данные:
- перемещаемая масса m=3 кг;
- максимальная линейная скорость V= 0,5 м/с;
- максимальное линейное перемещение Х= 0,2 м;
В результате расчета строятся следующие узлы:
1. сборочный чертеж модуля выдвижения
2. деталировка основных деталей модуля выдвижения
3. пневматическая схема модуля
4. расчёт основных параметров модуля выдвижения
Требуется спроектировать модуль горизонтального выдвижения руки промышленного робота.
Модуль должен содержать основную призматическую и вспомогательную цилиндрическую (шток пневмоцилиндра) направляющие. При проектировке модуля должны быть рассмотрены различные варианты его компоновки, и выбран более предпочтительный вариант.
Должны быть рассмотрены варианты плавного торможения с использованием демпфера и регулируемых упоров. Требуется унифицировать поверхности соединения с модулями поворота и подъёма.
Проанализировав техническое задание, было определено, что для реализации работы данного модуля следует использовать пневмоцилиндр двухстороннего действия. Опорой призматической направляющей лучше использовать - опору качения, которая обеспечит плавное выдвижение, ценой более сложного конструкционного решения. Для простоты регулирования используем пневмодемпфер двухстороннего действия и два регулируемых упора с «грубой» и «тонкой» регулировкой.
Проектирование модуля обычно начинается с выбора его общей компоновочно-кинематической схемы на основе известных схем.
Руководствуясь требованиями технического задания, требуется выбрать компоновочно-кинематическую схему модуля выдвижения руки робота, с основной призматической и вспомогательной цилиндрической (шток пневмоцилиндра) направляющими.
Основная направляющая обеспечивает прямолинейность движения и воспринимает боковую нагрузку, перпендикулярную оси движения. Вспомогательная направляющая, более тонкая и податливая по сравнению с основной, устанавливается для угловой фиксации входа модуля относительно оси движения.
При разработке было рассмотрено две схемы, представленные на рисунке 1 и рисунке 2
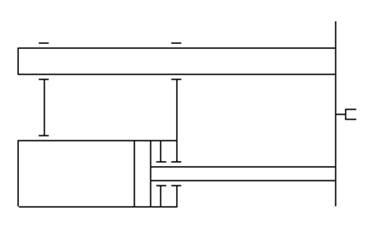
Рисунок 1- Конструктивно-компоновочная схема 1

Рисунок 2 – Конструктивно-компоновочная схема 2
На рисунке 1 вспомогательная направляющая крепится к основной с помощью связующих корпусов у входа модуля, а на рисунке 2 у выхода.
Общим недостатком этих схем является повышенный износ уплотняемой поверхности штока под действием боковой нагрузки.
Схема на рисунке 2 обеспечивает более точную угловую фиксацию, следовательно, и точность позиционирования, за счёт крепления силового цилиндра к связующему корпусу дополнительной опорой.
Схема на рисунке 1 отличается простотой конструкции, поэтому более технологична. Призматическая направляющая в данной схеме воспринимает в наибольшей степени боковую нагрузку, обеспечивая большую надёжность и плавность работы штока.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.