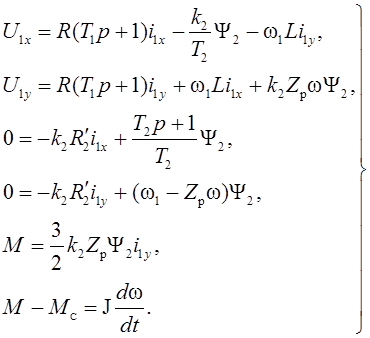
Структурная схема
двигателя, построенная в соответствии с уравнениями системы (1.38), показана на
рис. 1.5, где учтено, что  .
.

Рис. 1.5. Структурная схема в неподвижной системе
координат при ориентации вещественной оси по вектору ![]()
Во вращающейся системе координат ориентирована по вектору ![]() вещественная ось x. Тогда
вещественная ось x. Тогда
 и система уравнений
(1.37) приводится к виду (1.39).
и система уравнений
(1.37) приводится к виду (1.39).
 (1. 39)
(1. 39)
Соответствующая уравнениям (1.39) структурная схема показана на рис. 1.6.
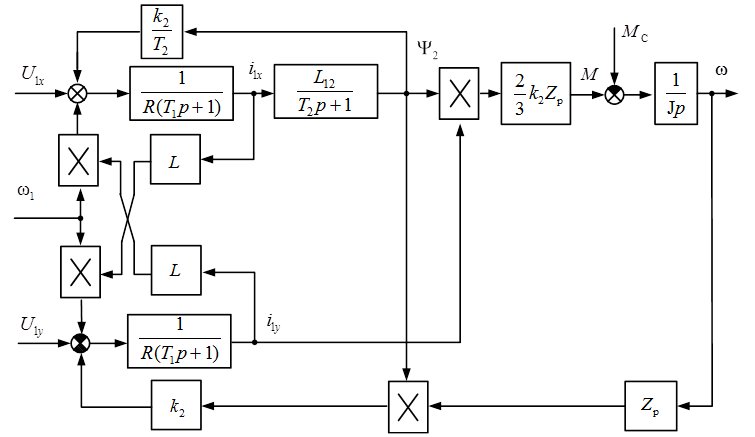
Рис. 1.6. Структурная схема во вращающейся системе координат
при ориентировании вещественной оси по вектору ![]()
Ориентация координатных систем по вектору потокосцепления ротора приводит к некоторому упрощению моделей двигателя, т. к. сокращается количество внутренних перекрестных связей.
2. Регулирование напряжения на выходе
двухзвенных преобразователей частоты
2.1. Амплитудно-импульсная модуляция
В современных системах асинхронного электропривода с частотным управлением основным вариантом выходного каскада преобразователя частоты (ПЧ) является автономный инвертор напряжения (АИН). Регулирование амплитуды основной гармоники выходного напряжения ПЧ осуществляется регулированием напряжения в звене постоянного тока, а регулирование частоты – изменением частоты переключения управляемых ключей АИН. Для электроприводов с мощностью до 1 мВт при построении управляемых выпрямителей и АИН обычно используются транзисторы (чаще – биполярные транзисторы с изолированным затвором – IGBT), в более мощных электроприводах применяются тиристоры (обычно – коммутируемые по затвору – IGCT). При необходимости рекуперации применяется реверсивный выпрямитель. На рис. 2.1 приведена схема ПЧ с нереверсивным выпрямителем, построенная с использованием транзисторов.
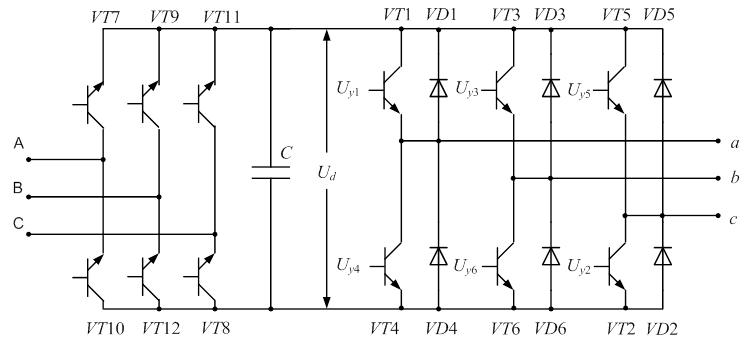
Рис. 2.1. Схема преобразователя частоты
При соединении обмоток статора двигателя по схеме «звезда» наиболее благоприятным является управление транзисторами АИН в следующей последовательности.
Сначала открываются VT1, VT2, VT3. На следующем интервале открыты VT2,
VT3, VT4. В последующем поинтервально будут
открываться (VT3, VT4, VT5), (VT4, VT5, VT6), (VT5, VT6, VT1), (VT6, VT1, VT2). При этом каждый транзистор работает в
течение полупериода выходного напряжения (рис. 2.2). Такое управление
принято называть управлением с ![]() ,
где
,
где ![]() – угол коммутации,
т. е. угол, в течение которого открыт каждый из транзисторов.
– угол коммутации,
т. е. угол, в течение которого открыт каждый из транзисторов.
Система фазных напряжений на выходе АИН является симметричной.
Основные гармоники напряжений U1A, U1B,
U1C обеспечивают формирование ![]() основной
составляющей электромагнитного момента и вращение основной составляющей
магнитного поля статора со скоростью
основной
составляющей электромагнитного момента и вращение основной составляющей
магнитного поля статора со скоростью  , где
, где  – основная частота
выходного напряжения; T – периодичность работы АИН; Zp –
число пар полюсов машины.
– основная частота
выходного напряжения; T – периодичность работы АИН; Zp –
число пар полюсов машины.
При соединении обмоток статора двигателя по схеме
«треугольник» используется управление с  , со следующей
последовательностью управления ключами: (VT1, VT2), (VT2, VT3), (VT4, VT5), (VT5, VT6), (VT6, VT1).
, со следующей
последовательностью управления ключами: (VT1, VT2), (VT2, VT3), (VT4, VT5), (VT5, VT6), (VT6, VT1).
В случае управления АИН с ![]() и соединении
обмоток статора звездой результирующий вектор напряжения на выходе АИН
описывается выражением [7, 8, 9]
и соединении
обмоток статора звездой результирующий вектор напряжения на выходе АИН
описывается выражением [7, 8, 9]
 , (2.1)
, (2.1)
где k =1, 2, 3,… – номер интервала
постоянства (неизменности) структуры АИН длительностью ![]() .
.
Аналогичным образом можно описать результирующий вектор ![]() при управлении с
при управлении с  и соединении
обмоток статора двигателя в треугольник.
и соединении
обмоток статора двигателя в треугольник.
Из выражения (2.1) следует, что вектор ![]() имеет постоянное
значение и занимает фиксированное (неподвижное относительно обмоток двигателя)
положение в течение интервала длительностью
имеет постоянное
значение и занимает фиксированное (неподвижное относительно обмоток двигателя)
положение в течение интервала длительностью ![]() , когда сохраняется
неизменность структуры АИН (находятся в проводящем состоянии одни и те же
транзисторы), и скачкообразно изменяет положение при наступлении следующего интервала
неизменности структуры АИН, повернувшись в положительном направлении на угол
, когда сохраняется
неизменность структуры АИН (находятся в проводящем состоянии одни и те же
транзисторы), и скачкообразно изменяет положение при наступлении следующего интервала
неизменности структуры АИН, повернувшись в положительном направлении на угол ![]() . При управлении с
. При управлении с
![]() в периоде
выходного напряжения АИН, содержатся 6 различных вариантов состояния
транзисторов и 6 различных вариантов положения вектора
в периоде
выходного напряжения АИН, содержатся 6 различных вариантов состояния
транзисторов и 6 различных вариантов положения вектора ![]() (рис. 2.3). На
концах векторов указаны сочетания транзисторов, на которые поданы отпирающие
импульсы.
(рис. 2.3). На
концах векторов указаны сочетания транзисторов, на которые поданы отпирающие
импульсы.
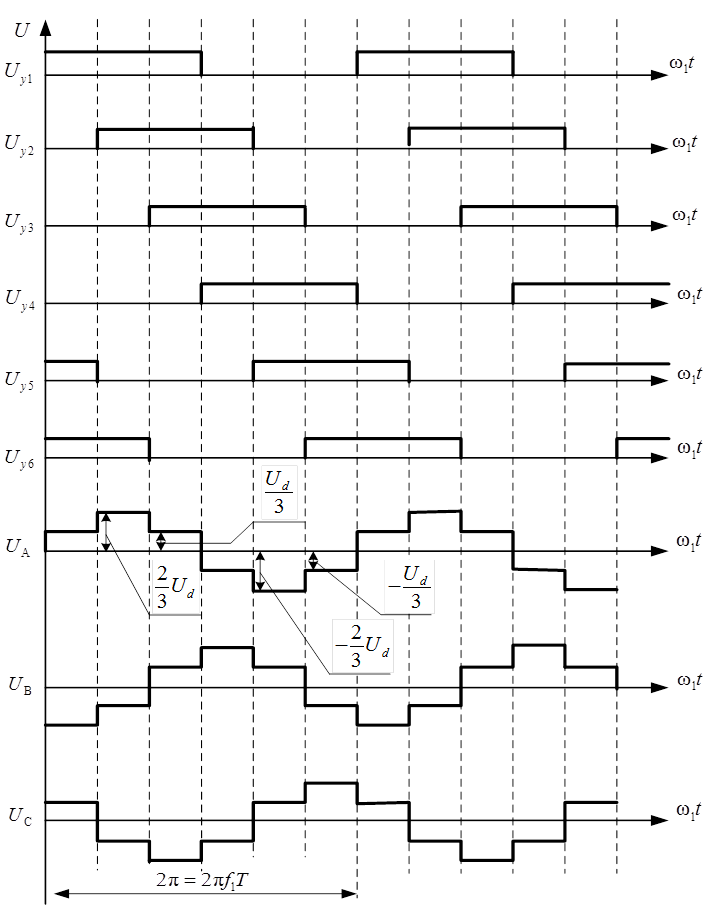
Рис. 2.2. Кривая напряжения на нагрузке при управлении
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.