 (1.3)
(1.3)
Если переменные состояния![]() ,
, ![]() ,
, ![]() описываются
выражениями (1.2), то
описываются
выражениями (1.2), то
 (1.4)
(1.4)
Таким образом, переменные состояния трехфазной
системы ![]() ,
, ![]() ,
, ![]() являющиеся гармоническими сигналами, в координатной
системе (α; β) также являются гармоническими сигналами.
являющиеся гармоническими сигналами, в координатной
системе (α; β) также являются гармоническими сигналами.
При разработке систем регулирования и моделировании
переходных процессов возникает необходимость обратного преобразования из
системы (α; β) в систему (A, B, C). Для получения необходимых соотношений используем
уравнения (1.4). Проекция ![]() вектора на ось обмотки фазы А определяется
непосредственно из первого выражения системы (1.4).
вектора на ось обмотки фазы А определяется
непосредственно из первого выражения системы (1.4).
При определении проекций ![]() и
и ![]() учтем, что
учтем, что ![]() . Тогда второе выражение в (1.3) можно записать
следующими способами:
. Тогда второе выражение в (1.3) можно записать
следующими способами:
 ,
,
 .
.
Следовательно,
 (1.5)
(1.5)
Для определения согласующего коэффициента kс, обеспечивающего выполнение условия инвариантности мощности при преобразовании переменных, определим мгновенные мощности, потребляемые обмотками статора трехфазного двигателя и обмотками эквивалентной двухфазной машины.
Мощность, потребляемая трехфазной машиной, равна
![]() .
.
Определив составляющие ![]() и
и
![]() обобщенных
векторов напряжения
обобщенных
векторов напряжения
и токов
в соответствии с выражениями (1.5), получим:

Две статорные обмотки эквивалентного двухфазного двигателя потребляют
мощность, равную ![]() .
.
Следовательно, условие инвариантности мощности при трехфазно-двухфазном и двухфазно-трехфазном преобразовании переменных выглядит следующим образом:
![]() .
.
Отсюда следует, что согласующий коэффициент равен
 .
.
Если результирующий вектор ![]() , рассматриваемый
в трехфазной системе координат
, рассматриваемый
в трехфазной системе координат ![]() ,
обозначим как
,
обозначим как ![]() , а тот
же вектор в системе (α; β) как
, а тот
же вектор в системе (α; β) как ![]() (α;
β), то упрощенно рассмотренные преобразования A, B, C /α;
β и α; β /A, B, C можно записать в виде
(α;
β), то упрощенно рассмотренные преобразования A, B, C /α;
β и α; β /A, B, C можно записать в виде ![]()
![]() (α; β) и
(α; β) и ![]() (α; β)
(α; β) ![]()
![]() .
.
Для вычисления проекций Zx, Zy вектора ![]() рассмотрим
преобразование вектора
рассмотрим
преобразование вектора ![]() (α; β) в
вектор
(α; β) в
вектор ![]() (x; y),
представляющим собой обобщенный вектор
(x; y),
представляющим собой обобщенный вектор ![]() , рассматриваемый
в системе координат (x; y),
вращающейся со скоростью вращения магнитного поля
, рассматриваемый
в системе координат (x; y),
вращающейся со скоростью вращения магнитного поля ![]() .
.
Если система координат (x; y)
повернута относительно системы (α; β) на угол ![]() , а вектор
, а вектор ![]() повернут
относительно оси α на угол φ (см. рис. 1.1), то справедливы
соотношения:
повернут
относительно оси α на угол φ (см. рис. 1.1), то справедливы
соотношения:
![]() ,
, ![]() .
.
Следовательно, для
преобразования ![]() (α; β)
(α; β) ![]()
![]() (x; y),
(x; y), ![]() (x; y)
(x; y) ![]()
![]() (α;
β) получаем следующие выражения:
(α;
β) получаем следующие выражения:
 (1.6)
(1.6)
Рис. 1.1. Представление обобщенного вектора
в неподвижной и вращающейся системах координат
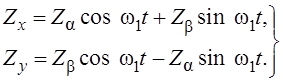
Учитывая, что ![]() ,
, ![]() , из первого
уравнения системы (1.6) получим:
, из первого
уравнения системы (1.6) получим:
![]() ,
,
Если ![]() ,
,![]() , то
, то

В частном случае, когда φ0 = 0, чему соответствуют уравнения
(1.4), ![]() ,
, ![]() .
.
Из рассмотренного следует, что в координатной системе (x, y) переменные состояния двигателя не содержат гармонических сигналов, т. е. представляются в виде сигналов постоянного тока.
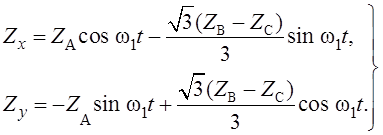
Из уравнений (1.3), (1.6) можно получить выражение для
преобразования ![]()
![]() (α; β) в
следующем виде:
(α; β) в
следующем виде:
Преобразование ![]()
![]() выполняется на
основе второго уравнения системы (1.7) и описывается выражениями
выполняется на
основе второго уравнения системы (1.7) и описывается выражениями
1.4. Исходные уравнения, описывающие
электромагнитные процессы
Уравнения баланса ЭДС в цепях статора и ротора базируются на втором законе Кирхгофа и записываются следующим образом:
 (1.7)
(1.7)
 (1.8)
(1.8)
Здесь R1 – активные сопротивления фазных обмоток статора; ![]() – токи в
статорных обмотках;
– токи в
статорных обмотках; ![]() –
потокосцепления обмоток статора;
–
потокосцепления обмоток статора; ![]() –
приведенные к статору активные сопротивления фаз ротора;
–
приведенные к статору активные сопротивления фаз ротора; ![]() – приведенные токи ротора;
– приведенные токи ротора; ![]() – потокосцепления фаз ротора.
– потокосцепления фаз ротора.
Следует подчеркнуть, что уравнения (1.7) записаны в трехфазной системе координат, жестко связанной с неподвижным статором, а уравнения (1.8) – в трехфазных координатах, жестко связанных с ротором.
Потокосцепление каждой обмотки зависит от токов во всех обмотках. Для статора получим систему [7]:
 (1.9)
(1.9)
Аналогичным образом для ротора можно записать:
 (1.10)
(1.10)
В выражениях (1.9), (1.10) приняты следующие обозначения:
![]() ,
, ![]() – соответственно индуктивности обмоток статора и
ротора, обусловленные основным потоком;
– соответственно индуктивности обмоток статора и
ротора, обусловленные основным потоком;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.