Учитывая, что  ,
где
,
где ![]() – число пар
полюсов машины, после вычисления производной и сокращения полученного уравнения
на
– число пар
полюсов машины, после вычисления производной и сокращения полученного уравнения
на ![]() , получим:
, получим:
 . (1.19)
. (1.19)
Используя второе уравнение системы (1.6), приведем уравнение (1.19) к вращающейся системе координат:
 .
.
Вычисляя производную и учитывая, что  , после сокращения
на
, после сокращения
на ![]() , получим в
окончательном виде:
, получим в
окончательном виде:
 .
.
В дальнейшем с целью упрощения аргументы в представлении векторов будем опускать и уравнения, описывающие электромагнитные процессы будем рассматривать в следующем виде:

1.7. Электромагнитный момент
Путем вычисления электромагнитной мощности,
передаваемой со стороны статора в воздушный зазор, в книге [11]
показано, что электромагнитный момент, развиваемый двигателем, зависит от
мнимой части векторного произведения векторов ![]() и
и ![]() :
:
 . (1.20)
. (1.20)
Здесь ![]() – вектор,
сопряженный вектору
– вектор,
сопряженный вектору ![]() .
.
Используя соотношения (1.17), выражение (1.20) можно представить также в следующих вариантах:
 (1.21)
(1.21)
 .
.
1.8. Математические модели двигателя
При построении систем частотного управления асинхронным двигателем в большинстве случаев основными регулируемыми и контролируемыми координатами являются ток статора и потокосцепление ротора [5]. В связи с этим для описания формирования электрического момента, развиваемого двигателем, используем формулу (1.27). Тогда с учетом уравнения движения полную систему уравнений, описывающих асинхронный двигатель, можем записать следующим образом:
 , (1.22)
, (1.22)
 , (1.23)
, (1.23)
![]() , (1.24)
, (1.24)
![]() , (1.25)
, (1.25)
 , (1.26)
, (1.26)
 . (1.27)
. (1.27)
Наилучший из способов частотного регулирования
– управление с поддержанием ![]() [11].
При этом механическая характеристика линейна, а электромагнитный момент
ограничен лишь условиями насыщения главной магнитной цепи при увеличении
скольжения.
[11].
При этом механическая характеристика линейна, а электромагнитный момент
ограничен лишь условиями насыщения главной магнитной цепи при увеличении
скольжения.
Преобразуем систему (1.22–1.27), исключив ![]() и
и ![]() .
.
Из (1.25)
 . (1.28)
. (1.28)
Из выражений (1.28) и (1.24) получим:
 . (1.29)
. (1.29)
Подставив (1.29) в уравнение (1.22), можем записать:

После подстановки выражения (1.28) в уравнение (1.23) получим:
 (1.31)
(1.31)
Тогда  и выражение
(1.30) можно представить в следующем виде:
и выражение
(1.30) можно представить в следующем виде:

Введем обозначения:
 ,
,
 ,
,
 ,
,

и уравнения (1.31), (1.32) перепишем следующим образом:
 , (1.33)
, (1.33)
 . (1.34)
. (1.34)
Применяя к (1.33), (1.34) преобразование Лапласа, получим:
 , (1.35)
, (1.35)
 , (1.36)
, (1.36)
где  .
.
Таким образом, метаматематическая модель двигателя описывается уравнениями (1.24–1.27), (1.35), (1.36).
При разложении обобщенных векторов по осям x и y
системы координат, вращающейся со скоростью ![]() вращения магнитного
поля двигателя, полную систему уравнений, описывающих двигатель, получим в
следующем виде:
вращения магнитного
поля двигателя, полную систему уравнений, описывающих двигатель, получим в
следующем виде:
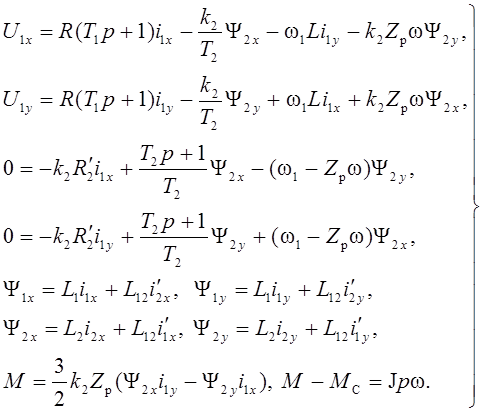
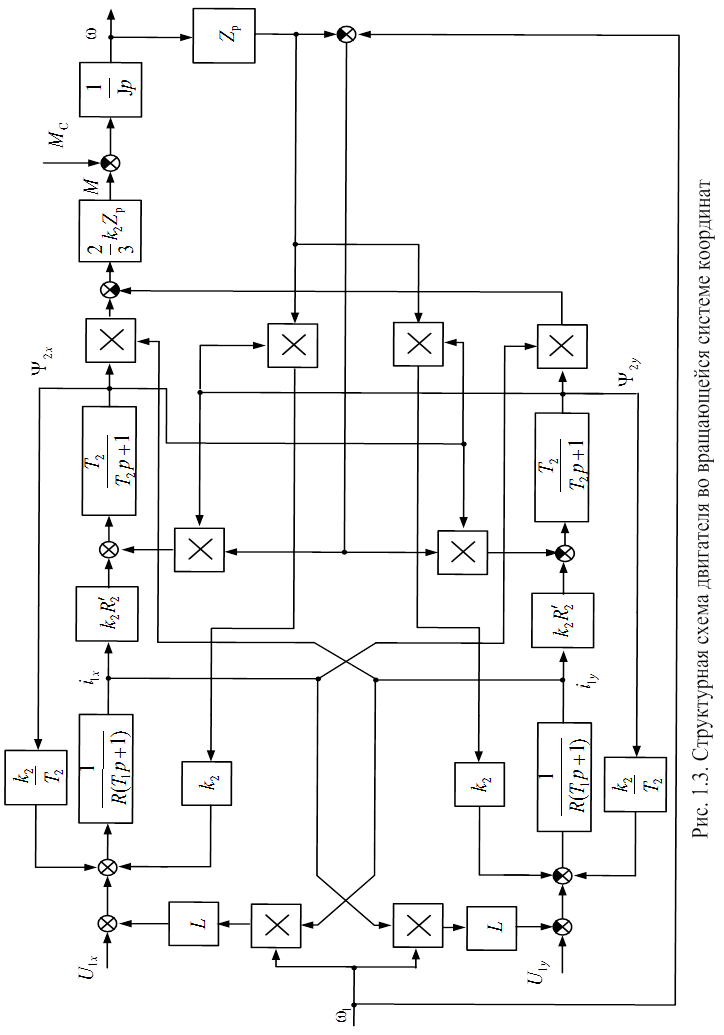

Соответствующая полученным уравнениям структурная схема приведена на рис. 1.3. Раскладывая обобщенные векторы по осям (α; β), получим систему уравнений:
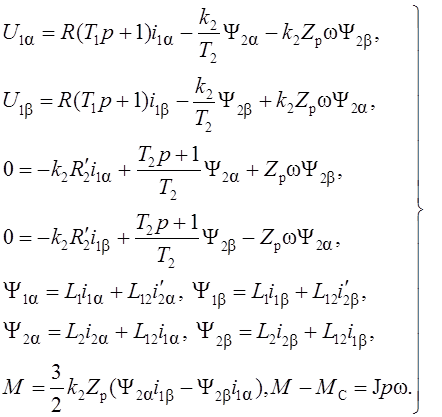
(1.37)
Структурная схема, построенная по уравнениям (1.37), приведена на рис. 1.4. При введении на рис. 1.3 и 1.4 структурные схемы характеризуют асинхронный двигатель с короткозамкнутым ротором как двумерный объект с внутренними перекрестными связями.
1.9. Математические модели двигателя при ориентации координатной системы по вектору потокосцепления ротора
В книге [11] показано, что при управлении с
поддержанием ![]() механическая
характеристика двигателя является линейной, а развиваемый электрический момент
ограничен лишь условиями насыщения главной магнитной цепи при увеличении
скольжения. В связи с этим способ регулирования скорости при
механическая
характеристика двигателя является линейной, а развиваемый электрический момент
ограничен лишь условиями насыщения главной магнитной цепи при увеличении
скольжения. В связи с этим способ регулирования скорости при ![]() в настоящее время
является основным. Реализация указанного способа обеспечения при ориентировании
вектора
в настоящее время
является основным. Реализация указанного способа обеспечения при ориентировании
вектора ![]() по вещественной
оси координатной системы.
по вещественной
оси координатной системы.
При описании двигателя в системе (α; β) и ориентации оси α по вектору потокосцепления ротора имеем:
 .
.
В этом случае уравнения (1.37) упрощаются:
 (1.38)
(1.38)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.