b2 = Aay − Acy − 2V3 3ωa11 − a12 3ω2. (22)
Положения звеньев данной группы Ассура определим по рис. 4, на котором приведены обозначения звеньев и кинематических пар.
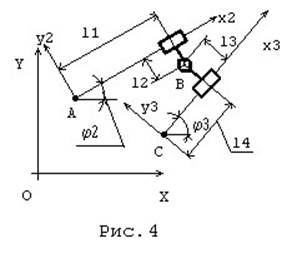
Запишем систему уравнений замкнутого контура в проекциях на координатные оси X,Y
AAxy ++ll11cossinϕϕ22 +−ll22cossinϕϕ22 == CCxy ++ll44cossinϕϕ33+−ll33cossinϕϕ33. (23)
Неизвестными в данных выражениях являются l1,l4, а остальные данные передаются в процедуру и являются известными. Полученная система уравнений является линейной относительно неизвестных. Запишем решение этой системы в виде:
b1 a12 a11 b1
 l1
=
ab112 aa2212
l4
=
aa1121
ab122 ,
(24)
l1
=
ab112 aa2212
l4
=
aa1121
ab122 ,
(24)
a21 a22 a21 a22
где коэффициенты a11,a12,a21,a22,b1,b2 определяются по выражениям:
aa1121 == cossinϕϕ22 aa1222 = −= −cossinϕϕ33 bb12 == CCxy −− AAxy+−l al a2 22 111 +−l al a3 223 12. (25)
Продифференцировав систему уравнений (23) по ϕ1, получим после простых преобразований:
b1 a12 a11 b1
V1
=
ab112 aa2212
V4
=
aa1121
ab122 ,
(26)
a21 a22 a21 a22
где a11,a12,a21,a22 определяются из (25), а b1,b2 - по выражениям:
bb12 ==VcVcxy −−VaVaxy+−ωω22((l al a11 1121 +−l al a22 2111))+−ωω3 4 223 4((l al a12 +−l al a33 2212)). (27)
Дважды продифференцировав (23) по ϕ1, можно получить
b1 a12 a11 b1
A1
=
ab112 aa2212
A4
=
aa1121
ab122 ,
(28)
a21 a22 a21 a22
где a11,a12,a21,a22 определяются из (25), а b1,b2 - по выражениям:
b1 = Acx − Aax + 2V1ω2 2a 1 +ω22(l a1 11 − l a2 21)+ε2(l a1 21 + l a2 11)
bb12 = b1 +y2V4 3 22ωya +ω32(l a4 12 −2l a3 22(l a1 2)1++εl a3 4 222(l a11)−ε+2l a(3l a1 1112) − l a2 21). (29)
= Ac − Aa − 2V1ω2a11 +ω2
b2 = b2 − 2V4 3ω a12 +ω32(l a4 22 + l a3 12)−ε3 4(l a12 − l a3 22)
Положения звеньев определим с помощью рис. 5, где приведена схема группы, обозначения звеньев и кинематических пар и система координат. Напишем проекции замкнутого векторного контура на координатные оси X,Y
Ax = Cx + Bx3 cosϕ3 + Ax2 cos(ϕ α3 + )−l2 sin(ϕ α3 + ). (30)
Ay = Cy + Bx3 sinϕ3 + Ax2 sin(ϕ α3 + )+l2 cos(ϕ α3 + )
Выражения (30) легко приводятся к линейной системе двух уравнений, решение которых мы проведем по правилу Крамера
b1 a12 a11 b1
Bx3 =
ab112 aa2212
Ax2 =
aa1121
ab122 ,
(31)
a21 a22 a21 a22
где коэффициенты a11,a12,a21,a22,b1,b2 определяются по следующим зависимостям:
aa1121 == cossinϕϕ33 aa1222 == cossin((ϕ αϕ α33 ++ )) bb12 == AAxy −−CCxy+−l al a2 222 12. (32)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.