Все библиотечные процедуры имеют входные параметры в виде координат, аналогов скоростей и ускорений внешних кинематических пар и вычисляют положения звеньев, образующих внутреннюю кинематическую пару, их аналоги скоростей и ускорений. Переход от аналогов скоростей и ускорений к действительным скоростям и ускорениям не вызывает затруднений:
Vi =Si’*ω1; Ai = Si’’*ω12;
Здесь Vi - скорость i-го звена,
Si’ - аналог скорости (передаточная функция) i-го звена,
ω1 - угловая скорость начального звена, Ai - ускорение i-го звена,
Si’’ - аналог ускорения i-го звена.
Необходимо отметить, что вышеприведенные соотношения справедливы только при постоянной угловой скорости начального звена. Так как кинематическое исследование предполагает постоянство угловой скорости такого звена, то данные определения аналогов скоростей и ускорений вполне корректны.
Компьютерное исследование кинематики механизма наиболее просто можно осуществить следующим образом: циклически задавая положение начального звена, обращаемся к процедуре, рассчитывающей кинематические характеристики группы Ассура, связанной с начальным звеном и стойкой механизма, затем определяем характеристики точки данной группы, кинематически связанной с последующей группой Ассура и обращаемся к соответствующей процедуре и т.д..
Работая в графическом режиме работы компьютера, можно сравнительно просто организовать имитацию движения механизма. Зная проекции аналогов скоростей и ускорений всех звеньев механизма, построить планы скоростей и ускорений в каждом положении механизма. Если необходимы значения кинематических характеристик, их можно вывести на дисплей.
Положения звеньев данной группы Ассура определим с помощью рис. 1, на котором представлена схема группы в соответствующей системе координат, обозначения звеньев и кинематических пар. Назовем конфигурацию группы сборкой № 1 когда координата точки B в локальной системе координат x1o1y1 By1 > 0, в противном случае мы имеем сборку № 2. Известны координаты точек A,C в абсолютной системе координат, длины звеньев l2 и l3 и необходимо определить абсолютные координаты точки B, углы φ2 и φ3. Расстояние AC определим по теореме Пифагора
![]() AC
=
(Cx
− Ax)2
+(Cy
− Ay)2
.
AC
=
(Cx
− Ax)2
+(Cy
− Ay)2
.
Угол α определим по формуле
Cy −
Ay
α=
arctan
![]() Cx −
Ax
, а
для определения локальных координат Bx1 и By1
воспользуемся теоремой косинусов и теоремой Пифагора. Учитывая, что Bx1
= l2cos∠BAC, получаем
Cx −
Ax
, а
для определения локальных координат Bx1 и By1
воспользуемся теоремой косинусов и теоремой Пифагора. Учитывая, что Bx1
= l2cos∠BAC, получаем
l22 + AC2 −l32 2 2
![]() Bx1 = ,
By1 =
l2 −
Bx1 .
Bx1 = ,
By1 =
l2 −
Bx1 .
2AC
Здесь необходимо отметить, что если конфигурация группы Ассура соответствует сборке № 2, то By1 = - By1.
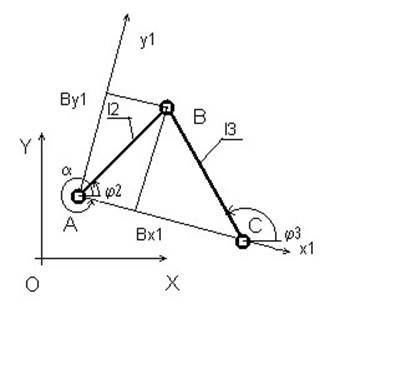
Рис. 1
Теперь совсем просто можно определить абсолютные координаты точки B, используя метод преобразования координат:
Bx = Ax + Bx1 cosα− By1 sinα
By = Ay + Bx1 sinα+ By1 cosα.
Затем определяем углы наклона звеньев l2,l3 - ϕ2 и ϕ3
By − Ay By −Cy
ϕ2
=
arctan
![]() Bx −
Ax
ϕ3
=
arctan
Bx −
Ax
ϕ3
=
arctan
![]() Bx −Cx
.
Bx −Cx
.
Так как все углы отсчитываются от положительного направления оси X, то в библиотеку процедур включена специальная функция, вычисляющая угол в радианах в любой четверти через арктангенс (Atan2). Более того, все вычисления углов в процедурах осуществляются при помощи этой функции.
Для определения аналогов скоростей воспользуемся методом замкнутых векторных контуров и напишем проекции векторного уравнения на координатные оси
AAxy ++ll22 cossinϕϕ22 ==CCyx ++ll33sincosϕϕ33. (1)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.