ll22 cossinϕϕ22−−ll44sincosϕϕ33==CCyx−−AAyx+−ll33cossinϕϕ33 . (9)
Произведя дифференцирование данной системы уравнений по ϕ1 и простейшие преобразования, получим линейную систем уравнений, в которой неизвестными являются ω2 и V4
ω−2 2ωl2 2cosl sinϕϕ2 −2 −V4Vsin4 cosϕ3ϕ=3 =VcVcy −x Va−Vay −x ω−ω3 3(l3 3(lsincosϕ3ϕ−3 l+4 cosl4 sinϕ3ϕ)3). (10)
Решение данной системы уравнений получим в виде
b1 a12 a11 b1
 ω2
=
ab112 aa2212
V4
=
aa1121
ab122 ,
(11)
ω2
=
ab112 aa2212
V4
=
aa1121
ab122 ,
(11)
a21 a22 a21 a22
где
aa1121 = −= l2lcos2 sinϕϕ22 aa1222 = −= −cossinϕϕ33 bb12 ==VcVcxy −−VaVaxy+−ωω3 4 223 4((l al a12 +−l al a33 2212)). (12)
Дважды продифференцировав (9) и проведя небольшие преобразования, получим значения аналогов ускорений ε2 и A4
b1 a12 a11 b1
 ε2
=
ab112 aa2212
A4
=
aa1121
ab122 ,
(13)
ε2
=
ab112 aa2212
A4
=
aa1121
ab122 ,
(13)
a21 a22 a21 a22
где a11,a12,a21,a22 определяются из (12), а b1,b2 вычислим следующим образом:
b1 = Acx − Aax −ω32(l4 cosϕ3 − l3 sinϕ ω3)+ 22l2 cosϕ2 − 2V4 3ω ϕ εsin 3 − 3 4(l sinϕ3 + l3 cosϕ3) b2 = Acy − Aay −ω32(l4 sinϕ3 + l3 cosϕ ω3)+ 22l2 sinϕ2 + 2V4 3ω ϕ εcos 3 + 3 4(l cosϕ3 − l3 sinϕ3). 14)
Положения звеньев данной группы можно определить, воспользовавшись данными рис. 3. Длину активной части кулисы l3 определим из выражения
![]() l3
=
(Ax
− Cx)2
+(Ay
− Cy)2
−
l22
,
(15)
l3
=
(Ax
− Cx)2
+(Ay
− Cy)2
−
l22
,
(15)
где координаты точек A,C и длина второго звена l2 известны. Угол наклона кулисы ϕ3 определим из выражения
ϕ3
=
arctan
![]() AAxy
−−
CCxy
− arctan
ll23
.
(16)
AAxy
−−
CCxy
− arctan
ll23
.
(16)
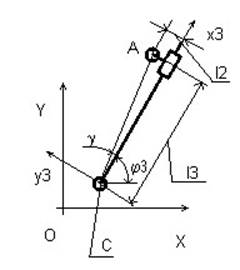
Рис. 3
Запишем проекции векторных уравнений замкнутых контуров на оси координат X,Y в следующем виде:
ll33 cossinϕϕ33+−ll22cossinϕϕ33 == AAxy −− CCxy. (17)
Продифференцировав (17) по ϕ1, получим, после небольших преобразований, систему уравнений
a Va V1121 33 ++ aa122 32 3ωω == bb12, (18) где
aa1121 == cossinϕϕ33 aa1222 = −= l3(cosl3 sinϕ3ϕ−3 l+2 sinl2 cos )ϕ33 bb12 ==VaVaxy −−VcVcxy. (19)
Следовательно, можно легко получить значения аналогов скоростей V3 и ω3
b1 a12 a11 b1
V3
=
ab112 aa2212
ω3
=
aa1121
ab122 .
(20)
a21 a22 a21 a22
Продифференцировав дважды (17) по ϕ1 и решив полученную систему уравнений, имеем:
b1 a12 a11 b1
A3
=
ab112 aa2212
ε3
=
aa1121
ab122 ,
(21)
a21 a22 a21 a22
где a11,a12,a21,a22 определяются из (19), а b1,b2 - по следующим выражениям:
b1 = Aax − Acx + 2V3 3 2ωa 1 + a22 3ω2
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.