Продифференцируем полученные уравнения по обобщенной координате ϕ1. Учитывая, что нам известны значения аналогов скоростей точек A и C
(Vax,Vay,Vcx,Vcy), а также значения углов ϕ2,ϕ3, получим линейную систему двух уравнений
ωω2 22 2ll sincosϕϕ ω22 −−ω3 33 3ll sincosϕϕ33==VaVcxy −−VcVaxy, (2)
где неизвестными являются аналоги скоростей ω2,ω3. Решение данной системы линейных уравнений проведем методом Крамера. В этом случае представляем уравнения в виде
aa1121ωω22 ++aa122 32 3ωω == bb12 , (3)
где коэффициентами a11,a12,a21,a22,b1,b2 представлены следующие постоянные, известные нам по значениям, выражения:
a11 = −l2 sinϕ2 a12 = l3 sinϕ3 b1 = Vcx −Vax a21 = l2 cosϕ2 a22 = −l3 cosϕ3 b2 = Vcy −Vay.
Тогда
b1 a12 a11 b1
 ω2
=
ab112 aa2212
ω3
=
aa1121
ab122 .
(4)
ω2
=
ab112 aa2212
ω3
=
aa1121
ab122 .
(4)
a21 a22 a21 a22
Для получения аналогов ускорений дважды продифференцируем уравнения (1) по ϕ1:
Aax −ω22l2 cosϕ ε2 − 2 2l sinϕ2 = Acx −ω32l3 cosϕ ε3 − 3 3l sinϕ3
Aay −ω22l2 sinϕ ε2 + 2 2l cosϕ2 = Acy −ω32l3 sinϕ ε3 + 3 3l cosϕ3. Преобразуем полученные выражения к виду (3)
a11ε2 + a12 3ε = b1 a21ε2 + a22 3ε = b2, где коэффициенты a11,a12,a21,a22 сохраняют свои старые значения, а b1,b2 определяются по следующим зависимостям:
b1 = Acx − Aax + a21ω22 + a22 3ω2 b2 = Acy − Aay − a11ω22 − a12 3ω2 .
В этом случае, аналоги ускорений ε2,ε3 будут равны:
b1 a12 a11 b1
 ε2
=
ab112 aa2212
ε3
=
aa1121
ab122 .
(5)
ε2
=
ab112 aa2212
ε3
=
aa1121
ab122 .
(5)
a21 a22 a21 a22
Схема данной группы Ассура, координатная система и обозначения кинематических пар и звеньев представлены на рис. 2.
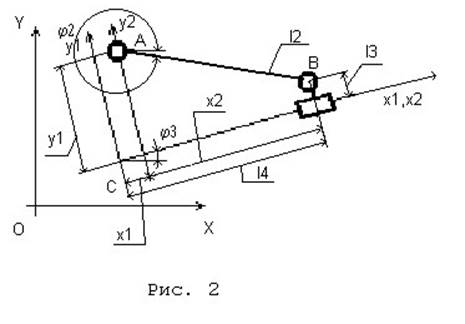
Вычислим координаты точки A в локальной системе координат X1CY1
CCxy ++ AAxx11 cossinϕϕ33+− AAyy11 cossinϕϕ33 == AAxy. (6)
В выражении (6) нам известны абсолютные координаты точек A,C, а также угол наклона направляющей для поступательной пары группы - ϕ3. К числу неизвестных, подлежащих определению, относятся координаты точки А в локальной системе координат X1CY1. Перенеся Cx и Cy в правую часть, получим линейную систему двух уравнений, решение которой представим в виде:
b1 − sinϕ3 cosϕ3 b1
 Ax1 =
cosb2ϕ3 co−ssinϕ3ϕ3
Ay1 =
cossinϕ3ϕ3−
sinb2ϕ3 .
(7)
Ax1 =
cosb2ϕ3 co−ssinϕ3ϕ3
Ay1 =
cossinϕ3ϕ3−
sinb2ϕ3 .
(7)
sinϕ3 cosϕ3 sinϕ3 cosϕ3
Здесь b1 = Ax - Cx и b2 = Ay - Cy. Так как определители знаменателей в (7) равны 1, то значения неизвестных равны значениям определителей, расположенных в числителях
Ax1 = b1 cosϕ3 + b2 sinϕ3 Ay1 = b2 cosϕ3 −b1sinϕ3. Далее определяем x2 - проекцию звена 2 на направляющую
![]() x2 =
l22
−(Ay1 −
l3)2 , а затем и длину направляющей CB
x2 =
l22
−(Ay1 −
l3)2 , а затем и длину направляющей CB
l4 = Ax1 + x2.
Абсолютные координаты точки B и угол наклона звена l2 определяем по следующим выражениям:
BBxy
==
CCxy
++
ll44
cossinϕϕ33+−ll33cossinϕϕ33
ϕ2 =
arctan
![]() BBxy
−−
AAxy
.
(8)
BBxy
−−
AAxy
.
(8)
Для определения аналогов скоростей напишем проекции замкнутых векторных контуров на координатные оси X и Y
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.