|
|
|
|
Рис.13 Рис.14
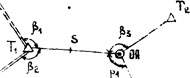
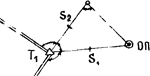
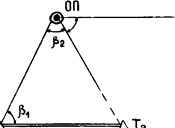
При привязке опознака по схеме "УС" (рис.13) для контроля измеряется на опознаке утлы b3 и b4 . Если с опознака нет видимости на исходные пункты (Т2 и Т3), то для контроля измеряется расстояние S2 и угол на вспомогательной точке I (рис.14).
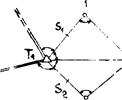
Если расстояние мевду исходными пунктами и опознаком непосредственно измерить нельзя, его вычисляют из вспомогательных тре -угольников, в которых измеряются стороны S1 и S2 и утлы на вспомогательных точках I и 2 (рис.15).
|
|
|
|
Рис.15
Расчет ожидаемой точности определения координат производится
по формуле
М=![]() . К =
. К =![]() (6.5)
(6.5)![]()
Для случая, когда расстояние проектируется определять аналитически (рис.15), можно для приближенных расчетов использовать формулу (6.6), вычисляя значение ms по длине большого базиса.
Если полученная М превышает установленную, следует повысить точность измерения углов или линий (пример дан в приложении 4).
6.4. Прямая угловая засечка
|
|
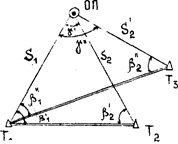
Для определения планового положения опознака прямой угловой засечкой необходимо иметь видимость на опознак не менее, чем с трех пунктов с известными координатами. Третьим контрольным направлением может быть направление с точки съемочного обоснова -ния. Угол засечки между двумя направлениями при опознаке ( g ) должен быть не менее 30° и не более 150° (рис.16). Предвычисление точности определений координат делается из двух однократных засечек, и за окончательное значение принимается среднее весовое. Если средняя квадратическая погрешность вычисления из двух построений, превышает допустимую, то следует уменьшать s или изменить угол g , т.е. взять за исходные другие пункты. Если этого нельзя сделать, надо уменьшить mb ,то есть предусмотреть использование прибора более высокой точности. Предвычисление точности определения координат опознака однократной засечкой делается по формуле
![]()
![]() (6.6)
(6.6)
Среднее весовое вычисляется по формуле (6.4). Пример предрасчета точности дан в приложении 5.
6.5. Обратная угловая засечка
Плановое положение опознака обратной угловой засечкой следует определять не менее чем по 4 исходным пунктам. Четвертое направление является контрольным. В качестве контрольного направления можно использовать направление на точку съемочной сети. Но при расчете точности должна быть учтена ошибка определения планового положения этой точки. Для предвычисления точности рекомендуется
использовать формулу:
 (6.7)
(6.7)
|
|
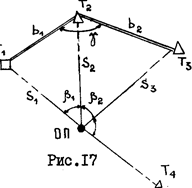
где
![]() - угол, составленный исходными
сторонами (рис.17);
- угол, составленный исходными
сторонами (рис.17);
b1 , b2 - расстояния между исходными пунктами;
![]() -
-![]() измеренные углы,
измеренные углы,
s1 s2 s3- проектные расстояния от определяемой точки Р до исходных пунктов.
Все
данные для расчета берутся с карты. Не следует проектировать определение
координат опознака обратной засечкой, если искомая точка расположена близко к
"опасному кругу", т, В этом случае сумма ( ![]() )
близка к 180° или 360°, а обращенный треугольник имеет минимальную площадь.
)
близка к 180° или 360°, а обращенный треугольник имеет минимальную площадь.
Расчет надо сделать для двух однократных засечек, т.е. используя две комбинации направлений из четырех запроектированных. За окончательное значение принимается среднее весовое, вычисляемое по формуле (6.4). Если полученное значение М превышает допустимое, то надо предусмотреть более высокую точность измерения углов или попытаться из 4-х направлений на исходные пункты выбрать такие две комбинации, при которых М была бы минимальной.
Если четвертое контрольное направление было направлением на точку съемочной сети, то надо вычислить окончательное значение ожидаемой погрешности определения планового положения опознака по формуле:
![]() (6.8)
(6.8)
где М1 - средняя квадратическая погрешность определения планового положения опознака из данного построения;
М2 - средняя квадратическая погрешность определения планового положения точки съемочной сети, служащей контрольной. Плановое положение опознака можно определить комбинированной засечкой (рис.18). Для предрасчета точности следует воспользоваться формулами (6.6), (6.7), (6.4).
|
|
При
определении планового положения опознаков засечками значения М и М" из однократных
построений не должны превышать величины 0,2/![]() ,а
среднее весовое должно быть не более 0,1 мм в масштабе плана.
,а
среднее весовое должно быть не более 0,1 мм в масштабе плана.
Рис. 18
6.6. Линейно-угловая засечка
Определение планового положения опознаков линейно-угловыми засечками следует предусматривать в проекте при возможности использования светодальномеров.
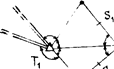
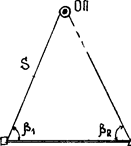
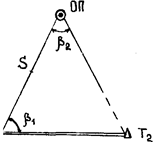
Прямая линейно-угловая засечка показана на рис.19. Измеряется длина стороны S и углы b1 и b2
|
Т1 |
|
|
|
Рис.19 |
|
|
|
|
|
Рис.20 |
Комбинированная линейно-угловая засечка показана на рис.20. Для этих двух видов построений рекомендуется формула
 (6.9)
(6.9)
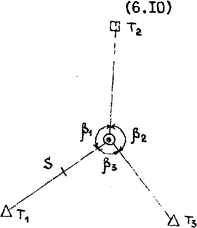
Обратная линейно-угловая засечка по 3 пунктам показана на рис.21. Измеряются: длина стороны S и углы b1 , b2 , b3 Расчет точности определения координат выполняется по формуле:
|
|
|
Рис.21 |
В
этих формулах: к= ![]()
ms - погрешность измерения расстояний.
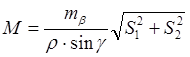
При составлении проекта следует учесть, что формулы (6.9) и (6.10) могут приме- няться только для случаев, когда тре -угольники имеют форму, близкую равносторонним, а углы в обратной засечке по 3 пунктам, примерно равны 120°.
6.7. Линейная засечка
|
|
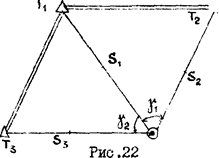
Линейную засечку (рис.22) целесообразно применять, если расстояния S1 и S2 измеряются оптическими дальномерами, свето- или радиодальномерами. Ожидаемая средняя квадратическая ошибка положения пункта из однократной засечки может быть рассчитана по формуле:
 , (6.11)
, (6.11)
где ms1 ms2 - средние квадратические погрешности измерения расстояний S1 и S2 .
Можно формулу использовать в следующем виде:
 , (6.12)
, (6.12)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.