|
Показатели |
4 класс |
I разряд |
2 разряд |
|
Предельная длина хода в км: |
|||
|
Отдельного |
15 |
5 |
3 |
|
между исходной и узловой точкой |
10 |
3 |
2 |
|
между узловыми точками |
7 |
2 |
1,5 |
|
Предельный периметр полигона в км. |
30 |
15 |
9 |
|
Длина сторон хода в км. наибольшая |
2,00 |
0,80 |
0,35 |
|
наименьшая |
0,25 |
0,12 |
0,08 |
|
оптимальная |
0,50 |
0,30 |
0,20 |
|
Число сторон в ходе не более |
15 |
15 |
15 |
|
Относительная погрешность хода не более |
1:25000 |
1:10000 |
1:5000 |
|
Средняя квадратическая погрешность измерения угла |
3" |
5" |
10" |
|
Угловая невязка хода или полигона не более ( - число углов в ходе) |
5" |
10" |
20" |
для хода произвольной формы
М2
= ![]() +
+ , (4.1)
, (4.1)
для вытянутого хода
М2 =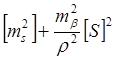
 (4.2)
(4.2)
где М - средняя квадратическая погрешность положения конеч-ной точки хода;
mS- средняя квадратическая погрешность измерения длин линий
mb- средняя квадратическая погрешность измерения углов;
[D2o,i]- сумма квадратов расстояний от центра тяжести "О" до всех точек хода (рис.2);
[S] - длина полигонометрического хода;
n - число линий в ходе.
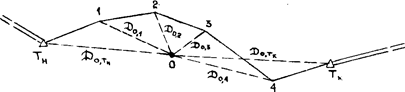
Рис.2
Учитывая соотношение
|
2М = fSпред., , |
|
(4.3) |
где fsпред.- предельная линейная невязка хода, при проектировании необходимо обеспечить выполнение условия
![]()
![]() (4.4)
(4.4)
где ![]() - предельная относительная невязка
полигонометрического хода, установленная Инструкцией /I/ (см. таблицу 3).
- предельная относительная невязка
полигонометрического хода, установленная Инструкцией /I/ (см. таблицу 3).
Центр тяжести "О" хода произвольной формы можно найти одним из следующих способов:
I) По карте или схеме определяют прямоугольные координаты всех вершин хода с помощью миллиметровой линейки. Начало осей координат совмещают с начальной точкой хода, а ось абсцисс - с замыкающей, соединяющей начальную и конечную точки. Вычисляют координаты центра тяжести по формулам:
 ,
,  (4.5)
(4.5)
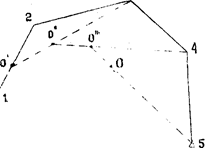
2) Положение центра тяжести может быть определено графическим способом. Нумеруют все вершины углов поворота (рис.3). Центр тяжести первой стороны хода о' соответствует ее середине. Середину первой стороны хода соединяют с вершиной 3. Центр тяжести О" для хода из трех пунктов находится на вновь проведенной линии на расстоянии 1/3 ее длины от центра тяжести первой стороны. Полученный центр тяжести 0" соединяют с вершиной 4, новый центр тяжести 0'" находится на расстоянии 1/4 отрезка ( 0”4). Затем 0'" соединяют с конечным пунктом 5 и находят
|
|
окончательное положение центра тяжести хода на расстоянии 1/5
отрезка ( 0'" 5).
Величина mb, средней квадратической погрешности измерения
|
Рис.3 |
горизонтальных углов устанавливается в зависимости от класса или разряда запроектированного хода в соответствии с таблицей 3. Вели- чину mb следует рассчитывать, учитывая предлагаемый метод измерения линий. При измерении линий светодальномерами погрешности измерения мало зависят от длины линии, поэтому можно считать, что
![]()
![]() (4.6)
(4.6)
Значение ms можно установить для предлагаемого типа свето-дальномера пользуясь справочной литературой (см.приложение 9 в /I/} Широкое применение получили светодальномеры 2СМ - 2, СМ-5 и др. (см.таблицу 4).
Таблица 4
|
Т и п дальномера |
Минимальное измеряемое расстояние |
Дальность действия |
Средн.квадрати-ческая погрешность измерения расстояний |
|
СМ-5 2СМ-2 |
2 2 |
700 2000 |
3 см 2 см |
При измерении расстояний редукционными тахеометрами значение средней квадратической погрешности измерения расстояний следует установить по формуле:
 (4.7)
(4.7)
где
![]() - средняя относительная погрешность
измерения расстояния дальномером данного типа. При измерении расстояний
редукци -онными тахеометрами Редта-002, ТД или оптическим дальномером ОТД
следует принимать
- средняя относительная погрешность
измерения расстояния дальномером данного типа. При измерении расстояний
редукци -онными тахеометрами Редта-002, ТД или оптическим дальномером ОТД
следует принимать
![]() =
=![]()
На основании выполненного предвычиcления точности полигонометрического хода следует сделать заключение о соответствии точности запроектированных ходов требованиям Инструкцией /I/. Если фактическая точность не соответствует требованиям /I/,следует внести соответствующие изменения в проект:
1) изменить длину хода или длины сторон;
2) заменить отдельные ходы системой ходов;
3) предусмотреть применение приборов, обеспечивающих большую точность измерений.
Предвычисление точности системы ходов можно сделать, вычислив Музл. - среднюю квадратическую погрешность планового полокения узловой точки по формуле :
Музл
= 
![]()
m- средняя квадратическая погрешность единицы веса;
Рузл.- вес узлового пункта
Отношение ![]()
 для
наиболее короткого хода системы не должно превышать допустимой относительной
погрешности полигонометрического хода соответствующего класса или разряда (см.
табл. 3).
для
наиболее короткого хода системы не должно превышать допустимой относительной
погрешности полигонометрического хода соответствующего класса или разряда (см.
табл. 3).
Общая погрешность такого хода М2S между исходными и узловыми пунктами:
![]()
где М вычисляется по формуле (4.1) или (4.2) в зависимости от формы хода.
Для системы ходов с несколькими узловыми точками Рузл.
можно вычислить, применяя:
1) способ эквивалентной замены;
2) способ последовательных приближений;
3) приближенную формулу Козлова В.П.
Так, например, формула В.П.Козлова имеет вид
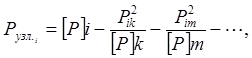 (4.9)
(4.9)
где
![]() - сумма весов всех ходов сходящихся
в узловых точках сети с номерами i , к , m и т.д.
- сумма весов всех ходов сходящихся
в узловых точках сети с номерами i , к , m и т.д.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.