















3. Расчет статических характеристик и динамических
параметров элементов систем автоматического управления.
3.1. Расчет статических характеристик и динамических
параметров объекта управления.
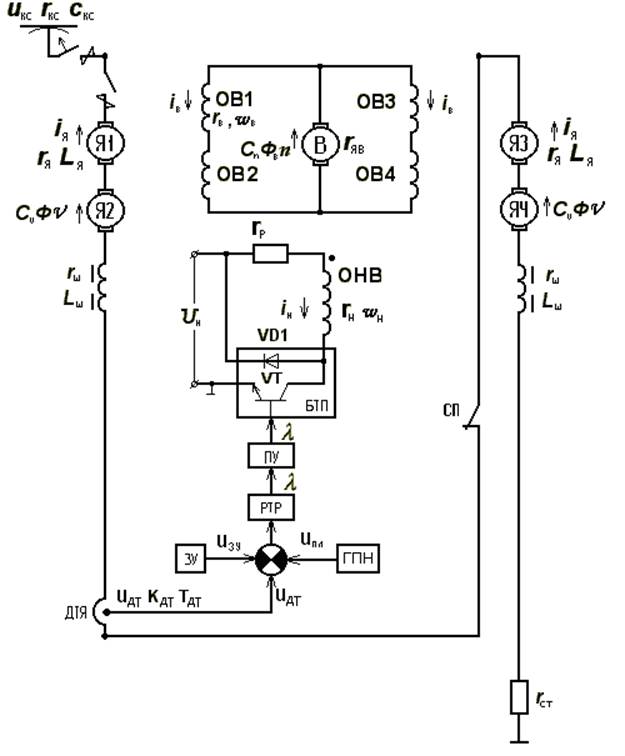
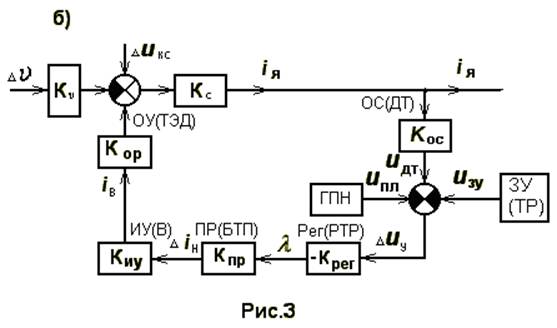
Объект управления - тяговые электродвигатели имеют две
электрические индуктивно связанные цепи. Одна из них - цепь якорей. Через нее
передаются на объект управления возмущающие воздействия в виде изменений уровня
напряжения контактной сети ![]() и скорости движения
и скорости движения![]() .
.
Другая цепь - цепь возбуждения. Через нее передается
на объект управления регулирующее воздействие в виде изменения тока возбуждения![]() .
.
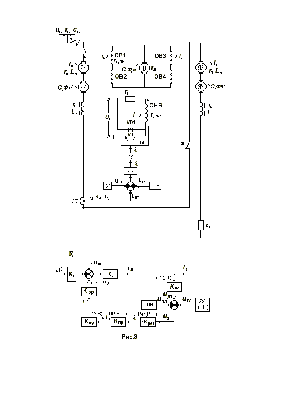
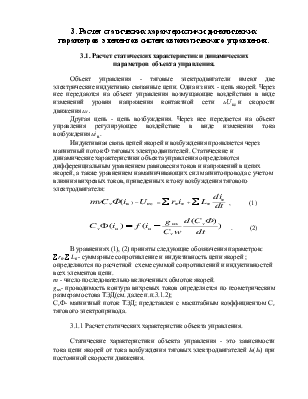
Индуктивная связь цепей якорей и возбуждения проявляется через магнитный поток Ф тяговых электродвигателей. Статические и динамические характеристики объекта управления определяются дифференциальным уравнением равновесия токов и напряжений в цепях якорей, а также уравнением намагничивающих сил магнитопровода с учетом влияния вихревых токов, приведенных к току возбуждения тягового электродвигателя:
 , (1)
, (1)
 .
(2)
.
(2)
В уравнениях (1), (2) приняты следующие обозначения параметров:
årя,å Lя - суммарные сопротивление и индуктивность цепи якорей ; определяются по расчетной схеме суммой сопротивлений и индуктивностей всех элементов цепи.
m - число последовательно включенных обмоток якорей.
gвх- проводимость контура вихревых токов определяется по геометрическим размерам остова ТЭД(см. далее п.п.3.1.2);
СvФ- магнитный поток ТЭД; представлен с масштабным коэффициентом Сv тягового электропривода.
3.1.1 Расчет статических характеристик объекта управления.
Статические характеристики объекта управления - это зависимости тока цепи якорей от тока возбуждения тяговых электродвигателей Iя(Iв) при постоянной скорости движения.
Дифференциальные уравнения (1),(2) содержат нелинейные зависимости магнитного потока от тока возбуждения CvФ(Iв), кроме того уравнение (1) содержит произведения переменных: скорости движения v и магнитного потока СvФ. Расчет статических характеристик объекта регулирования выполняют графо-аналитическим методом, приняв постоянные значения скорости v1, v2 и приравняв нулю производные тока якорей и магнитного потока в уравнениях (1),(2).
Для расчета характеристик Iя(Iв) надо произвести вычисления магнитного потока (с масштабным коэффициентом тягового привода) при постоянных значениях тока якорей и скорости движения v1, v2, В/(км/ч):
 .
(3)
.
(3)
Затем, для каждого значения магнитного потока СvФ надо определить по характеристике намагничивания СvФ(Iв) величину тока возбуждения Iв.
На электровозах ВЛ-10 и ВЛ-11м установлены тяговые электродвигатели ТЛ2К1. Для независимого возбуждения электродвигателей в режимах рекуперативного электрического торможения применяются электромашинные агрегаты генераторы постоянного тока НБ436В.
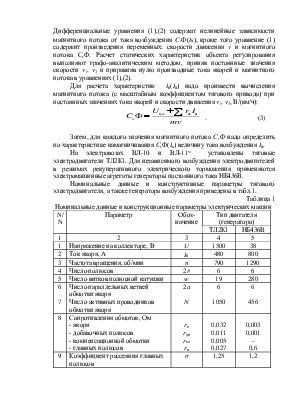
Номинальные данные и конструктивные параметры тягового электродвигателя, а также генератора возбуждения приведены в табл.1.
Таблица 1
Номинальные данные и конструкционные параметры электрических машин
|
N/N |
Параметр |
Обоз- начение |
Тип двигателя (генератора) |
|
|
ТЛ2К1 |
НБ436В |
|||
|
1 |
2 |
3 |
4 |
5 |
|
1 |
Напряжение на коллекторе, В |
U |
1500 |
38 |
|
2 |
Ток якоря, А |
Iя |
480 |
800 |
|
3 |
Частота вращения, об/мин |
n |
790 |
1290 |
|
4 |
Число полюсов |
2р |
6 |
6 |
|
5 |
Число витков полюсной катушки |
w |
19 |
280 |
|
6 |
Число параллельных ветвей обмотки якоря |
2а |
6 |
6 |
|
7 |
Число активных проводников обмотки якоря |
N |
1050 |
456 |
|
8 |
Сопротивления обмоток, Ом - якоря - добавочных полюсов - компенсационной обмотки - главных полюсов |
rя rдп rко rв |
0,032 0,011 0,005 0,027 |
0,003 0,001 - 0,6 |
|
9 |
Коэффициент рассеяния главных полюсов |
σ |
1,25 |
1,2 |
|
10 |
Геометрические размеры сердечников полюсов; м : - длина, - ширина, - высота. |
lп bп hп |
0,44 0,25 0,13 |
0,12 0,09 0,13 |
|
11 |
Геометрические размеры остова; м : - осевая длина, - толщина по радиусу, - длина полюсной дуги. |
hо sо lm |
0,62 0,07 0,56 |
0,3 0,015 0,4 |
|
12 |
Конструкционный коэффициент обмоток |
C |
167,113 |
72,611 |
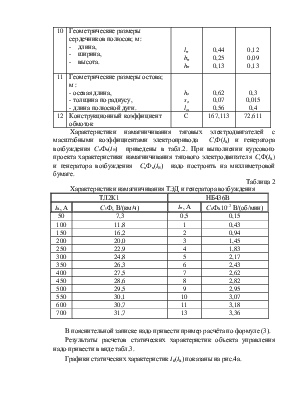
Характеристики намагничивания тяговых электродвигателей с масштабными коэффициентами электропривода СvФ(Iв) и генератора возбуждения СnФв(Iн) приведены в табл.2. При выполнении курсового проекта характеристики намагничивания тягового электродвигателя СvФ(Iв) и генератора возбуждения СnФв(Iн) надо построить на миллиметровой бумаге.
Таблица 2
Характеристики намагничивания ТЭД и генератора возбуждения
|
ТЛ2К1 |
НБ436В |
||
|
Iв, А |
СvФ, В/(км/ч) |
Iн, А |
СnФв10-2 В/(об/мин) |
|
50 |
7,3 |
0,5 |
0,15 |
|
100 |
11,8 |
1 |
0,43 |
|
150 |
16,2 |
2 |
0,94 |
|
200 |
20,0 |
3 |
1,45 |
|
250 |
22,9 |
4 |
1,83 |
|
300 |
24,8 |
5 |
2,17 |
|
350 |
26,3 |
6 |
2,43 |
|
400 |
27,5 |
7 |
2,62 |
|
450 |
28,6 |
8 |
2,82 |
|
500 |
29,5 |
9 |
2,95 |
|
550 |
30,1 |
10 |
3,07 |
|
600 |
30,7 |
11 |
3,18 |
|
700 |
31,7 |
13 |
3,36 |
В пояснительной записке надо привести пример расчёта по формуле (3).
Результаты расчетов статических характеристик объекта управления надо привести в виде табл.3.
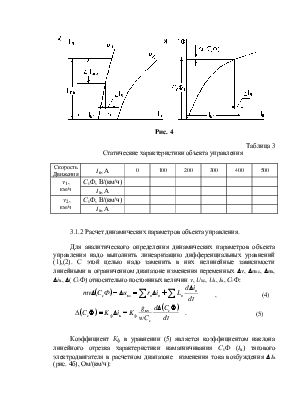
Графики статических характеристик Iя(Iв) показаны на рис.4а.
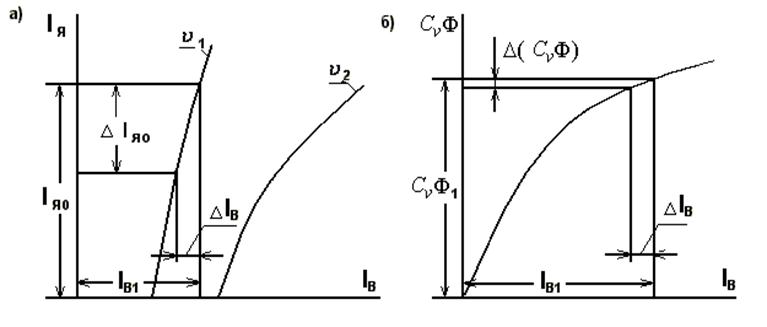 Рис. 4
Рис. 4
Таблица 3
Статические характеристики объекта управления
|
Скорость Движения |
Iя, А |
0 |
100 |
200 |
300 |
400 |
500 |
|
v1, км/ч |
СvФ, В/(км/ч) |
||||||
|
Iв, А |
|||||||
|
v2, км/ч |
СvФ, В/(км/ч) |
||||||
|
Iв, А |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.