|
Рис.7.6. Кинематическая схема продольно-строгального станка мод. 7212:
M1 -двигатель привода стола; М2 и М3 - двигатели привода вертикальных и горизонтального суппортов; М4 и М5 - двигатели перемещения и зажима поперечины; М 1 - М23 - муфты; Р1 - P10 -органы ручного привода; У1 и У2 - упоры разжима фрикциона при подаче и при зарядке храпового механизма; XIи Х2 - храповые механизмы для подачи; Л – лимб
Электродвигатель с медленного вращения (для рабочего хода стола) на быстрое обратное переключается автоматически от переставных кулачков, привертываемых) к столу станка так же, как при других системах привода.
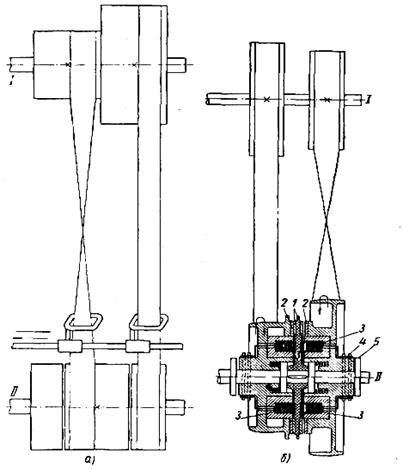
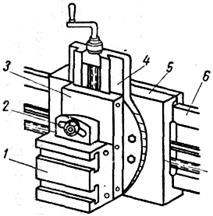
Рис.7.6.. Схемы реверсивных Рис.7.7. Вертикальный суппорт приводов продольно-строгальных продольно-строгального станка станков.
Как указывалось раньше, движение столу передается от приемного вала через прямозубую или косозубую, либо червячную рейку, привернутую к нижней поверхности стола.
В первом случае реечное колесо, сцепляющееся с рейкой, получает вращение от приемного вала через несколько цилиндрических передач (рис.7.8, а). Скорость рабочего хода стола Vp (скорость резания) подсчитывается по формуле
где nэ – число об/мин электродвигателя; i — передаточное отношение между валом электродвигателя и реечным колесом; т и z — соответственно модуль (в мм) и число зубьев реечного колеса. Во втором случае с рейкой сцепляется червяк, который получает вращение от приемного вала через одну постоянную зубчатую передачу (рис.7.8, б).
Скорость резания Vp подсчитывается по формуле 
где i — передаточное отношение между валом электродвигателя и червяком;
т и k — соответственно модуль в мм и число заходов червяка; а — угол между осью червяка и направлением движения стола; β — угол подъема витков червяка.
Механизм подачи сообщает суппортам станка с закрепленными в них резцами периодические перемещения в конце каждого холостого хода стола. Для осуществления таких перемещений применяются различные механизмы, в состав которых в большинстве случаев входит храповая передача. Движение подачи берется либо от кулачков, привернутых к столу, либо от одного из валов привода стола, либо, наконец, от индивидуального электродвигателя.
|
1— электродвигатель; 2 —косозубая рейка; 3 — прямозубая рейка; 4 — стол станка; 5 — реечное колесо; 6 — червяк. |
На рис.7.9 схематически показана одна из простейших конструкций механизма подачи. К столу станка сбоку привернуты кулачки 1 и 4. В конце холостого хода кулачок 4 задевает за плечо 2 рычага 5 и заставляет его повернуться вокруг оси 1 против часовой стрелки; при этом тяга 6 повернет против часовой стрелки кривошипный диск 7. В пазу диска 7 закреплен переставной палец 8, шарнирно соединенный посредством тяги 9 с зубчатой рейкой 10. При повороте диска 7 рейка 10 поднимается вверх и повернет на определенный угол реечное колесо z1, заклиненное на валу //. На том же валу жестко насажен храповик z2и свободно сидит зубчатое колесо z3, несущее на себе собачку 11. При повороте колеса z1 через храповую передачу получает вращение колесо z3, находящееся в постоянном зацеплении с колесами z4 и z5. Первое из них может быть жестко закреплено на ходовом винте ///, сообщающем вертикальному суппорту горизонтальную подачу, а второе — на ходовом валу IV,сообщающем каретке суппорта вертикальную подачу. В начале рабочего хода кулачок 1задевает за плечо 3 рычага 5, поворачивает диск 7 в обратном направлении и заставляет рейку 10 опуститься. При этом собачка 11 свободно скользит по зубьям колеса z2; колеса z3, z4, z5 останутся неподвижными, и, следовательно, суппорт также будет неподвижен. Подача регулируется перестановкой пальца 8 в пазу кривошипного диска 7; она подсчитывается также, как и для поперечно-строгальных станков.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
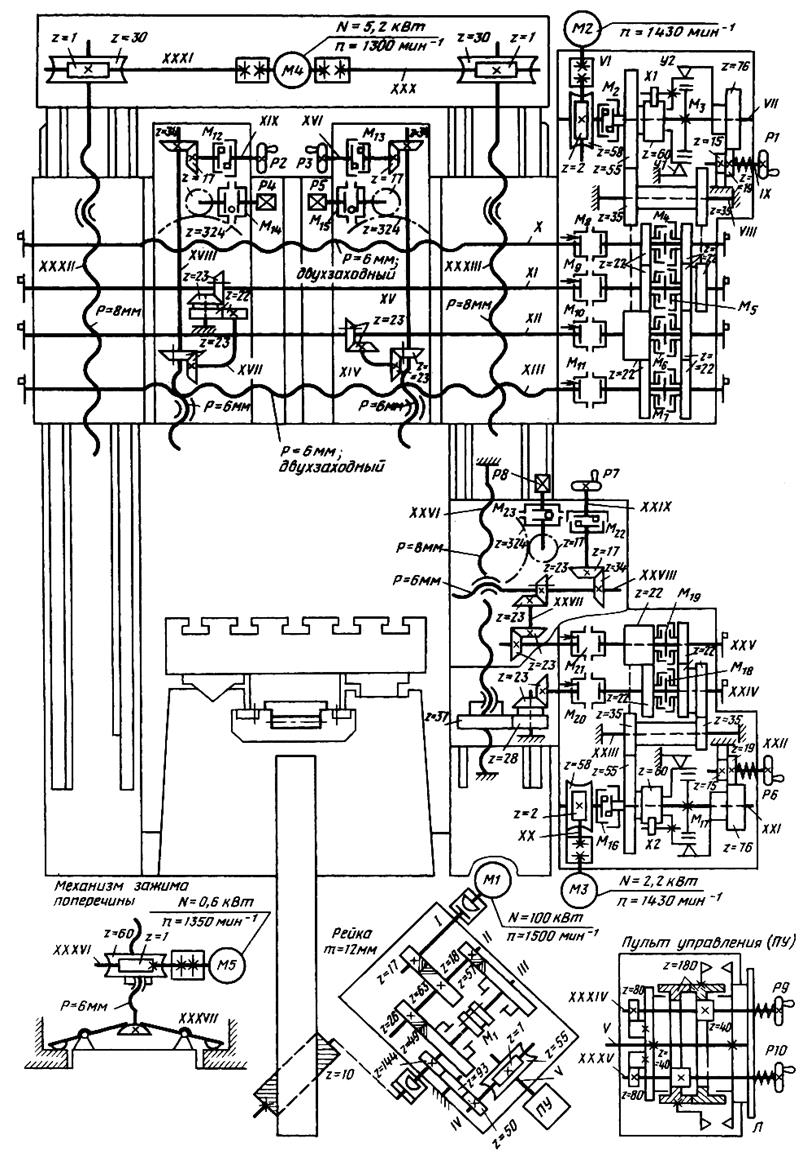
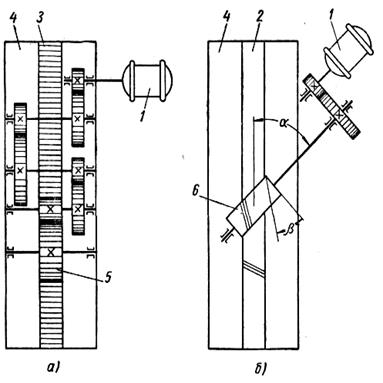 Рис.7.8. Схема привода стола продольно-строгальных станков:
Рис.7.8. Схема привода стола продольно-строгальных станков: