где – матрица частных производных по
переменным состояния или якобиан исследуемой системы (1);
– матрица частных производных по
переменным состояния или якобиан исследуемой системы (1);
![]() – матрица частных производных по
параметрам системы.
– матрица частных производных по
параметрам системы.
Таким образом, функции чувствительности могут быть найдены посредством решения системы дифференциальных уравнений порядка n´m. Получение и решение такой системы уравнений является достаточно трудоемкой задачей, особенно для систем высокого порядка, и требует применения приближенных численных методов. Кроме того, на практике часто интерес представляет оценка чувствительности только некоторых переменных состояния, например, выходного сигнала, сигнала ошибки и т.п.
В простейших случаях, когда удается получить в аналитической форме законы изменения переменных состояния для основного движения, функции чувствительности могут быть получены непосредственно их дифференцированием.
Из всех элементов системы угловой стабилизации (СУС), наибольшей инерционностью обладает рулевой привод (РП), что позволяет в качестве инерционности системы стабилизации рассматривать инерционность рулевого привода.
Рулевой привод – следящая система с жесткой обратной связью.
Основным исполнительным элементом рулевого привода является рулевая машинка. Рулевые машинки бывают нескольких типов:
· электрическая (электродвигатель);
· электропневматическая;
· электрогидравлическая.
В системах управления ЛА чаще всего используются электрогидравлические рулевые машинки, связано это, прежде всего, с необходимостью развивать большие крутящие моменты и требованиями по быстродействию.
Рулевой привод включает в себя (рисунок 2):
· усилитель рулевого привода;
· рулевую машинку;
· цепь обратной связи.
|
|
|
Рисунок 2 – Функциональная схема рулевого привода |
Добротность РП – произведение коэффициентов усиления в замкнутом контуре:
|
|
( |
где ![]() – коэффициент усиления рулевого
тракта;
– коэффициент усиления рулевого
тракта;
![]() – коэффициент усиления (передачи)
рулевой машинки;
– коэффициент усиления (передачи)
рулевой машинки;
![]() – коэффициент усиления в цепи
обратной связи.
– коэффициент усиления в цепи
обратной связи.
В большинстве случаев рулевой привод имеет жесткую обратную связь, кроме того рабочие режимы моделирования, как правило, обеспечивают квазилинейное движение, при котором нелинейностями типа «насыщение» можно пренебречь [5].
Учитывая подобные допущения схема рулевого привода может быть представлена последовательностью линейных динамических звеньев (рисунок 3).
 |
Рисунок 3 – Линеаризованная схема рулевого привода
Линеаризованный рулевой привод может быть описан следующей системой линейных дифференциальных уравнений:
![]() (6)
(6)
Перепишем систему (6) в следующем виде:



![]()
где![]() – вектор переменных
состояния;
– вектор переменных
состояния;
![]() – вектор параметров
системы;
– вектор параметров
системы;
![]() – управляющий сигнал,
вырабатываемый системой управления.
– управляющий сигнал,
вырабатываемый системой управления.
Для
расчета функций чувствительности математической модели рулевого привода
определим матрицы ![]() и
и
![]() . В итоге получим:
. В итоге получим:
 ,
,
Подставляя
полученные матрицы![]() и
и ![]() в уравнение
чувствительности (5) и раскрывая матричное уравнение получаем систему
дифференциальных уравнений, определяющих элементы матрицы чувствительности
в уравнение
чувствительности (5) и раскрывая матричное уравнение получаем систему
дифференциальных уравнений, определяющих элементы матрицы чувствительности ![]() .
.






![]()
![]()
![]()
![]() (7)
(7)
В общем виде модель получения матрицы чувствительности может быть представлена в виде схемы, представленной на рисунке 4.
![]()
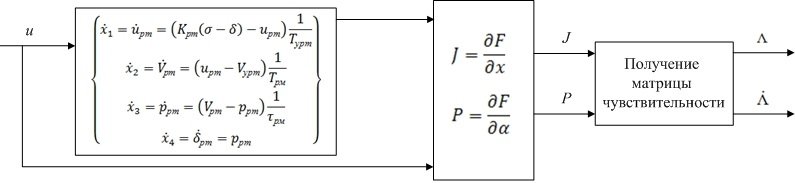
Рисунок 4 – Общая схема алгоритма чувствительности
Беря
частные производные ![]() и
и ![]() , получаем матрицы
, получаем матрицы ![]() ,
, ![]() . В свою очередь, блок получения
матрицы чувствительности представляется в виде схемы, представленной на рисунке
5.
. В свою очередь, блок получения
матрицы чувствительности представляется в виде схемы, представленной на рисунке
5.
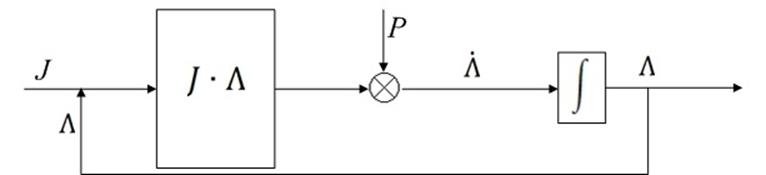
Рисунок 5 – Схема вычисления матрицы Λ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.