Практическое занятие 12. Практический пример применения принципа максимума
Рассмотрим задачу синтеза системы стабилизации, оптимальной по быстродействию.
Рассматривается линейный стационарный объект
управления, описываемый системой уравнений ![]() , где X
– вектор переменных состояния размерности n, U
– вектор управляющих сигналов размерности r, Aи B– матрицы
постоянных коэффициентов размерности
, где X
– вектор переменных состояния размерности n, U
– вектор управляющих сигналов размерности r, Aи B– матрицы
постоянных коэффициентов размерности ![]() и
и ![]() соответственно. Требуется сформировать
программу управления и структуру системы, обеспечивающие стабилизацию данного
объекта, то есть достижение состояния xi(T)=0, i=1,2,…,n, за минимальное время. Предполагается наличие начальных условий xi(0)= xi0, i=1,2,…,n, и ограничений на управление
соответственно. Требуется сформировать
программу управления и структуру системы, обеспечивающие стабилизацию данного
объекта, то есть достижение состояния xi(T)=0, i=1,2,…,n, за минимальное время. Предполагается наличие начальных условий xi(0)= xi0, i=1,2,…,n, и ограничений на управление ![]() ,
l=1,2,…,r.
,
l=1,2,…,r.
Как показано в лекции 23, оптимизируемый функционал
здесь вводится в виде:  .
.
Запишем уравнения объекта управления в развернутом виде и составим функцию Гамильтона:
 , i=1,2,…,n;
, i=1,2,…,n;
 .
.
Поскольку функция Гамильтона линейна относительно всех аргументов ui, нетрудно убедиться в отсутствии у нее локального экстремума. Следовательно, оптимальное управление может быть найдено только на границах. Другими словами, каждая составляющая оптимального управления в рассматриваемой задаче может принимать только значения +ulm или –ulm.
Перепишем выражение для функции Гамильтона следующим образом:
 .
.
Очевидно, что для достижения максимума здесь необходим выбор значений управляющих сигналов по правилу:
![]() при
при
 ,
,
![]() при
при
или
 , l=1,2,…,r. Такое управление называют релейным.
, l=1,2,…,r. Такое управление называют релейным.
А.А. Фельдбаумом доказана следующая теорема (теорема
об n интервалах): если характеристические числа матрицы A
линейного объекта управления вещественные и область допустимых управлений
ограничена неравенствами вида ![]() , то каждая составляющая оптимального по
быстродействию управления кусочно-постоянна и имеет не более n-1 переключения, где n – порядок модели объекта управления.
, то каждая составляющая оптимального по
быстродействию управления кусочно-постоянна и имеет не более n-1 переключения, где n – порядок модели объекта управления.
Итак, при соблюдении условий теоремы в рассматриваемой задаче каждый управляющий сигнал в пределах диапазона времени [0; T] должен принимать значения +uim или -uim и сохранять их в пределах интервалов [ti; ti+1], причем i=0,1,…,n; t0=0, tn=T.
Характеристические (собственные) числа матрицы A могут быть определены путем решения уравнения det(A–lI)=0, где I– единичный вектор размерности n.
Отметим, что результат теоремы распространяется на
случай несимметричной относительно начала координат области допустимых
управлений: ![]() , если только signulmax=–signulmin.
, если только signulmax=–signulmin.
Для случая комплексных характеристических чисел также доказано, что для линейного объекта, для которого все характеристические числа матрицы A лежат в левой полуплоскости (имеют отрицательную вещественную часть), всегда может быть однозначно определено оптимальное по быстродействию управление, если только границы допустимых значений всех составляющих управляющего сигнала имеют разный знак: signulmax=–signulmin.
Вернемся к примеру синтеза системы стабилизации
искусственного спутника земли относительно продольной оси, рассмотренному в
лекции 14. Начальные условия для процесса стабилизации считаются заданными: x1(0)=x10, x2(0)=x20 и могут иметь произвольные значения; правые граничные условия нулевые: x1(T)=x2(T)=0. Ограничение на управление определяется предельной мощностью
двигателей системы ориентации: ![]() . Критерий оптимальности управления
. Критерий оптимальности управления ![]() .
Таким образом, получен частный случай рассмотренной выше задачи, в котором
объект управления описывается моделью второго порядка (n=2).
.
Таким образом, получен частный случай рассмотренной выше задачи, в котором
объект управления описывается моделью второго порядка (n=2).
Матрица A объекта управления имеет
вид:  , уравнение для определения
характеристических чисел
, уравнение для определения
характеристических чисел  , характеристические
числа матрицы A l1=l2=0 вещественные. Следовательно, в соответствии с теоремой
об n интервалах, оптимальный управляющий сигнал на
интервале [0; T] может принимать значения +um или -um, причем возможно не более одного переключения.
Возможные варианты:
, характеристические
числа матрицы A l1=l2=0 вещественные. Следовательно, в соответствии с теоремой
об n интервалах, оптимальный управляющий сигнал на
интервале [0; T] может принимать значения +um или -um, причем возможно не более одного переключения.
Возможные варианты:
1) u=um, ![]() ; 2) u=um,
; 2) u=um, ![]() ; 3)
; 3) 
4) 
Вид процесса в рассматриваемой системе при двух указанных значениях управляющего сигнала был установлен в лекции 14. Фазовые переменные связаны уравнениями:
при
u=+um:  ;
;
при
u=-um:  , где
произвольные постоянные определяются через конкретные начальные условия, а в
случае наличия переключения – с учетом условий припасовывания.
, где
произвольные постоянные определяются через конкретные начальные условия, а в
случае наличия переключения – с учетом условий припасовывания.
При u=+um соответствующие фазовые траектории, показанные на рисунке а), будут представлять собой параболы, причем одна из них, уравнение которой
 , проходит
через начало координат. Ее обозначим c+.
, проходит
через начало координат. Ее обозначим c+.
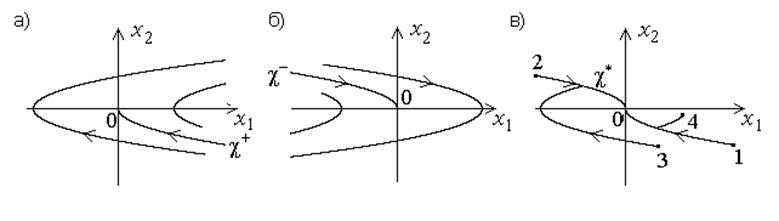
При u=-um соответствующие фазовые траектории (рисунок б) также будут иметь вид парабол, причем траектория c-, проходящая через начало координат, описывается уравнением
 .
.
Таким образом, достичь требуемого состояния равновесия системы соответствующего началу координат, можно только по траекториям c+ и c-.
Далее с учетом возможности только одного переключения управления в рассматриваемой задаче можно сделать следующие выводы: если точка (x10, x20), соответствующая начальным условиям, будет лежать на кривой c+ (правой ветви кривой c* на рисунке в), оптимальное по быстродействию управление будет иметь вид 1; если точка (x10, x20) окажется на кривой c- - вид 2; левее кривой c*, объединяющей c+ и c- - вид 3; правее кривой c* - вид 4.
В первых двух случаях переключение отсутствует, в последних двух - имеет место одно переключение в момент времени, когда фазовая траектория достигает кривой c*. Следовательно, кривая c* является на фазовой плоскости линией переключения для оптимального управления. Уравнение кривой c* дает условие переключения для оптимального управления:
 .
.
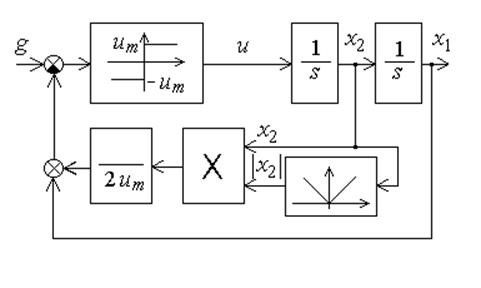
Теперь можно записать уравнение оптимального по быстродействию закона управления следующим образом:
 .
.
Структурная схема оптимальной по быстродействию системы стабилизации показана на рисунке.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.