Лекция 1. Основные понятия теории управления и радиоавтоматики. Фундаментальные принципы управления. Классификация систем управления. Общая характеристика задач анализа и синтеза систем
Основное содержание теории управления составляют математические методы анализа и синтеза систем. Основные задачи анализа - исследование свойств системы, прежде всего, устойчивости (в большинстве случаев неустойчивая система неработоспособна) и оценка показателей ее качества. Основные задачи синтеза – корректировка существующей системы или построение новой системы в соответствии с требованиями к ее свойствам и качеству.
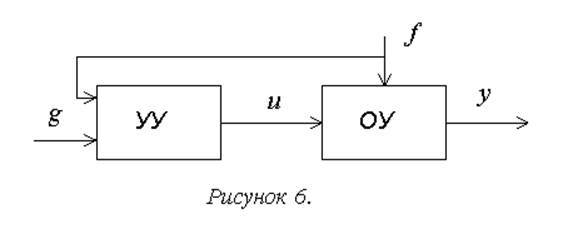
Управление - это организованное воздействие на объект с целью обеспечения требуемого течения процесса в объекте или требуемого изменения его состояния.
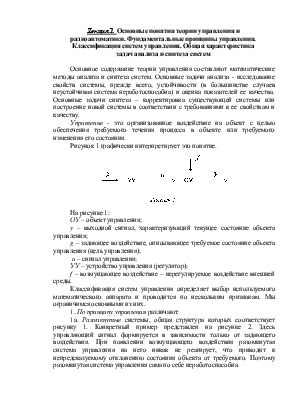
Рисунок 1 графически интерпретирует это понятие.
На рисунке 1:
ОУ – объект управления;
y – выходной сигнал, характеризующий текущее состояние объекта управления;
g – задающее воздействие, описывающее требуемое состояние объекта управления (цель управления);
u – сигнал управления;
УУ – устройство управления (регулятор);
f – возмущающее воздействие – нерегулируемое воздействие внешней среды.
Классификация систем управления определяет выбор используемого математического аппарата и проводится по нескольким признакам. Мы ограничимся основными из них.
1. По принципу управления различают:
1а. Разомкнутые системы, общая структура которых соответствует рисунку 1. Конкретный пример представлен на рисунке 2. Здесь управляющий сигнал формируется в зависимости только от задающего воздействия. При появлении возмущающего воздействия разомкнутая система управления на него никак не реагирует, что приводит к непредсказуемому отклонению состояния объекта от требуемого. Поэтому разомкнутая система управления сама по себе неработоспособна.
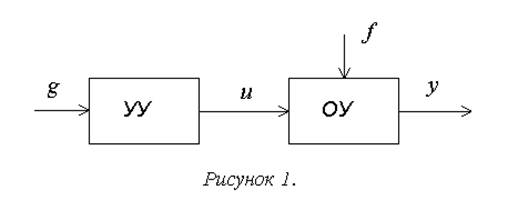
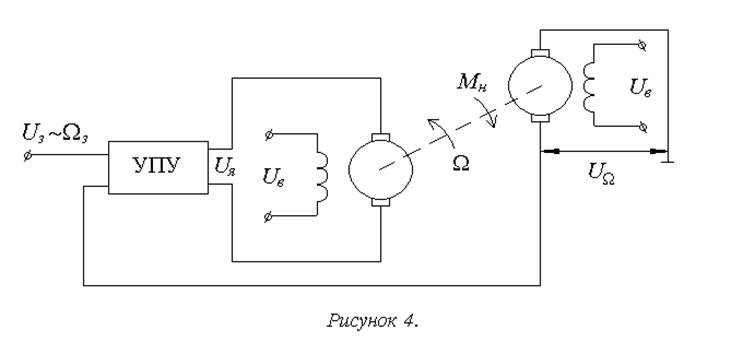
1б. Замкнутые системы, реализующие управление на основе принципа обратной связи – формирование сигнала управления на основе сравнения текущего состояния объекта управления с требуемым (рисунок 3).
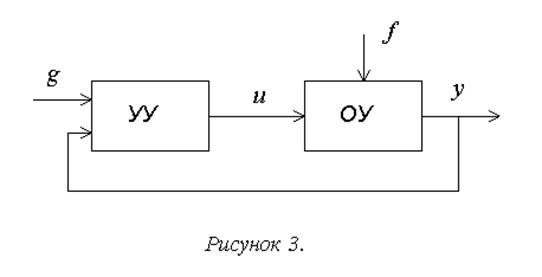
Простейший и основной вариант реализации принципа обратной связи – жесткая единичная отрицательная обратная связь. В этом случае сигнал управления формируется в соответствии с уравнением:
u(t)=k(g(t) – y(t)). (1.1)
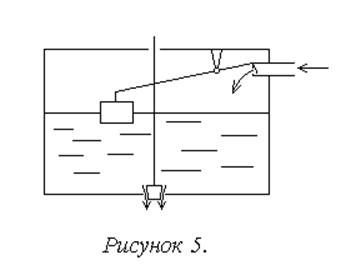
Примеры замкнутых систем представлены на рисунках 4, 5.
Более подробная классификация замкнутых систем проводится по виду обратной связи.
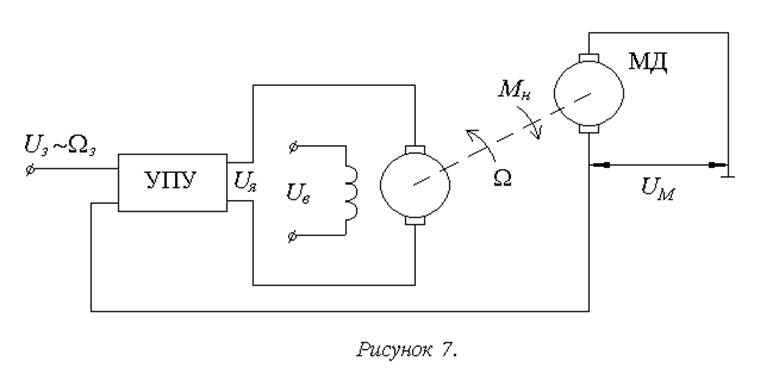
1в. Системы с компенсацией возмущения. Принцип компенсации возмущающего воздействия предусматривает измерение или оценку (идентификацию) величины возмущающего воздействия и использование этой информации для формирования управляющего сигнала (рисунки 6, 7)
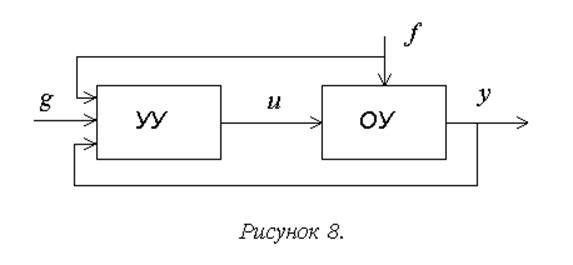
1г. Системы комбинированного управления реализуют сочетание рассмотренных выше принципов. Наиболее распространенный вариант – замкнутая система с компенсацией возмущения (рисунки 8,9).
1д. Адаптивные системы. Принцип адаптивного управления состоит в накоплении в процессе работы системы информации о поведении объекта управления и характеристиках внешней среды и использовании этой информации для корректировки структуры и параметров закона управления (настройки устройства управления).
2. По цели управления различают:
2а. Системы стабилизации:g=const. К их числу относятся все рассмотренные примеры.
2б. Системы программного управления: g= g(t). Пример – система управления ракетой-носителем. При выведении спутника на заданную орбиту законы изменения высоты, скорости, направления движения и пр. рассчитываются заранее. Задачей системы управления является обеспечение их изменения по заданным законам.
2в. Следящие системы: g=var. Пример – система управления антенной радиолокационной станции наблюдения за воздушной обстановкой. Задачей системы является обеспечение совмещения оси антенны с летательным аппаратом при заранее неизвестном законе его движения.
2г. Системы терминального управления. Пример – система самонаведения ракеты. Задачей системы является обеспечение минимального расстояния от ракеты до цели (промаха) в определенный конечный момент времени.
2д. Системы экстремального управления. Такие системы строят, когда в процессе управления требуется обеспечить максимум или минимум некоторых показателей (критериев оптимальности). Пример – система мягкой посадки космического летательного аппарата. Задачей системы является обеспечение мягкой посадки при заранее неизвестных начальных скорости и высоте с минимальным расходом топлива.
3. По структуре различают одномерные (со скалярными входными сигналами) и многомерные (с векторными входными сигналами) системы управления.
4. По форме математического описания различают линейные и нелинейные системы.
4а. Линейной является системы, для всех элементов которой может быть получено математическое описание в форме линейных алгебраических или дифференциальных уравнений.
4б. Если хотя бы один элемент системы не может быть описан линейным уравнением, вся система рассматривается как нелинейная.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.