Гироскопом
называется твердое тело, быстро вращающееся вокруг своей оси симметрии, соответствующей
максимальному осевому моменту инерции. Движение гироскопа – пример движения
тела, имеющего только одну закрепленную точку. Такое движение в каждый момент
может рассматриваться как вращение вокруг оси, проходящей через эту точку.
Если положение твердого тела относительно неподвижной системы отсчета задавать
углами Эйлера ![]()
![]() (рис.1), то мгновенная угловая скорость
(рис.1), то мгновенная угловая скорость ![]() тела может быть
представлена как сумма:
тела может быть
представлена как сумма:
![]() =
= ![]() 1 +
1 + ![]() 2
+
2
+ ![]() 3 ,
(1)
3 ,
(1)
где ![]() 1 =
1 =![]() - скорость собственного вращения вокруг оси симметрии
тела;
- скорость собственного вращения вокруг оси симметрии
тела; ![]() 2 =
2 = ![]() - скорость прецессии;
- скорость прецессии;![]()
![]() 3 =
3 = ![]() - скорость нутации;
- скорость нутации;
 |
|||
|
|||
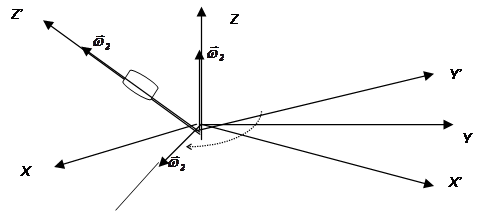
OXYZ – неподвижная прямоугольная система координат; OX’Y’Z’ - жестко связанная с телом прямоугольная система координат;ON – линия узлов (линия пересечения плоскостей XOY и X’O’Y’);j - угол собственного вращения;Y - угол прецессии;q - угол нутации.
При этом вектор угловой
скорости ![]() меняет свое положение как относительно
неподвижной системы отсчета, так и относительно самого тела.
меняет свое положение как относительно
неподвижной системы отсчета, так и относительно самого тела.
Описание поведения гироскопа основано на применении уравнения моментов:
 (2)
(2)
где
![]() - момент импульса гироскопа
относительно закрепленной точки О;
- момент импульса гироскопа
относительно закрепленной точки О;
![]() - сумма моментов сил относительно той же
точки.
- сумма моментов сил относительно той же
точки.
Заметим,
что в общем случае движения момент импульса ![]() не
совпадает по направлению ни с вектором угловой скорости
не
совпадает по направлению ни с вектором угловой скорости ![]() , ни с одним из направлений, отмеченных на
рис.1
, ни с одним из направлений, отмеченных на
рис.1
Однако если гироскоп вращается очень быстро вокруг своей оси симметрии, то есть:
w1 >> w2 и w1 >> w3 ,
то
вектор угловой скорости ![]() и вектор момента
импульса
и вектор момента
импульса ![]() практически совпадают с направлением оси
симметрии гироскопа OZ’.
практически совпадают с направлением оси
симметрии гироскопа OZ’.
На
этом основании в элементарной теории гироскопа делается допущение, что момент
импульса ![]() направлен вдоль оси собственного вращения
гироскопа.
направлен вдоль оси собственного вращения
гироскопа.
Если гироскоп уравновешен, то его центр масс совпадает с неподвижной точкой О и, следовательно, сила тяжести не создает относительно точки О момента, а моментами сил сопротивления можно пренебречь и тогда согласно (2)

и момент импульса должен оставаться постоянным. В этом случае ось симметрии быстро вращающегося гироскопа сохраняет свое направление относительно неподвижной системы координат.
Если ось гироскопа подвергнуть кратковременному воздействию (ударить), то момент импульса получит малое приращение
![]() ,
,
после чего ось гироскопа будет совершать быстрые колебания с малой амплитудой около своего среднего положения. Такое движение оси гироскопа называется нутацией.
Если же на ось гироскопа действует момент внешних сил, то наблюдается движение оси, называемое прецессией. В соответствии с основным допущением элементарной теории считаем, что момент импульса гироскопа направлен вдоль оси собственного вращения и может быть выражен формулой:
![]() 1,
(3)
1,
(3)
где I – момент инерции гироскопа относительно оси OZ’.
Если
на ось гироскопа действует сила ![]() , то создаваемый ею
момент сил
, то создаваемый ею
момент сил ![]() относительно точки О за время
относительно точки О за время ![]() сообщит моменту импульса приращение
сообщит моменту импульса приращение ![]() , направленное перпендикулярно оси
гироскопа. Это приращение вызывает поворот оси гироскопа в направлении
, направленное перпендикулярно оси
гироскопа. Это приращение вызывает поворот оси гироскопа в направлении ![]() .
.
Если
сила ![]() продолжает действовать, то конец вектора
продолжает действовать, то конец вектора ![]() должен описывать окружность в плоскости,
перпендикулярной к оси OZ, а ось гироскопа будет прецессировать вокруг оси OZ, занимая в
пространстве последовательность позиций, образующих конус прецессии.
должен описывать окружность в плоскости,
перпендикулярной к оси OZ, а ось гироскопа будет прецессировать вокруг оси OZ, занимая в
пространстве последовательность позиций, образующих конус прецессии.
Выведем выражение для скорости прецессии. По определению:
w2 = ![]() .
.
Как видно из чертежа,
и для скорости прецессии с учетом (2) и (3) получим
w2 = (4)
(4)
Выполнение работы.
Упражнение 1.
Проверка формулы для скорости прецессии
При постоянной скорости
собственного вращения ![]() проверить справедливость
соотношения, вытекающего из (4):
проверить справедливость
соотношения, вытекающего из (4):
 (5)
(5)
Здесь положено F = P, поскольку единственной силой, действующей на ось гироскопа является сила тяжести.
Упражнение предлагается выполнять в следующем порядке.
1. Установить скорость вращения двигателя = 5000 об/мин.
2. Найти положение равновесия гироскопа. Для этого необходимо установить
такое положение противовеса (4), при котором прецессия отсутствует. Это и будет положение равновесия. Измерения провести не менее пяти раз, причем для каждого нового измерения необходимо вывести гироскоп из положения равновесия, полученного в предыдущем измерении.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

