Определить среднее значение положения равновесия (rп.р.) и оценить погрешность. Значение (rп.р.) затем считается положением равновесия, а погрешность величины r (значение отклонения величины груза от положения равновесия) будут определяться погрешностями величины (rп.р.).
3. Смещая груз с положения равновесия на r = 1 см; 2 см; 3 см, измерить соответствующие этим трем случаям скорости прецессии. Для того, чтобы измерить скорость прецессии, включают миллисекундомер кнопками «Сеть» и «Сброс» (кнопка «Сброс» является одновременно и кнопкой пуска прибора). По шкале «Периоды», находящейся на передней панели миллисекундомера, отсчитывается угол поворота лимба. Единица шкалы прибора соответствует углу поворота лимба на 10°. Показания прибора можно проконтролировать по шкале лимба. Время, за которое этот поворот произошел, отсчитывается по шкале «Секунды» миллисекундомера. Отношение угла поворота лимба ко времени, за которое этот поворот произошел, дает величину скорости прецессии. Остановка прибора производится кнопкой «Стоп», при этом необходимо иметь ввиду, что для уменьшения погрешностей измерения отсчеты следует снимать для наибольших возможных поворотов гироскопа (оптимальные значения 180 - 360°) или до тех пор, пока существует прецессия. Составить таблицу измеренных величин и найти отношение r к w2 с указанием погрешности измеренного значения.
Упражнение 2.
Определение момента инерции гироскопа относительно оси собственного вращения.
1. Сместить противовес из положения равновесия на r = 3см.
2. Установить скорость вращения вала, равную 3000, 4000, 5000, 6000, об/мин и измерить соответствующие скорости прецессии.
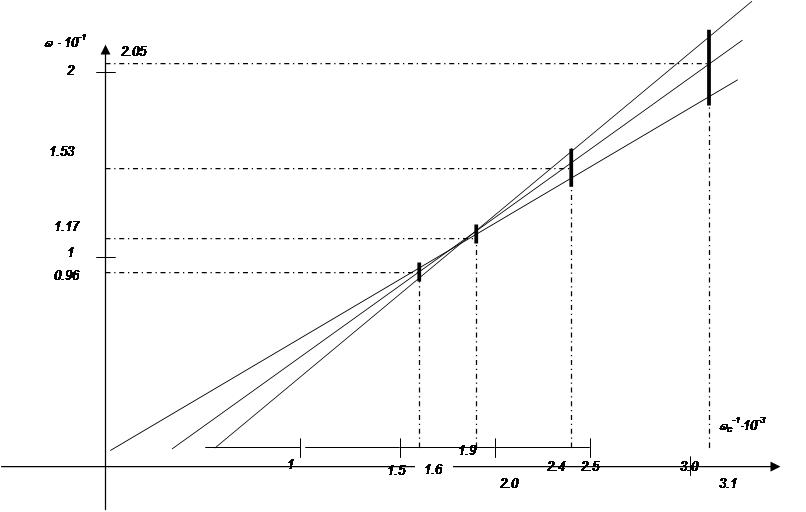
3. Построить
график зависимости ![]() от
от ![]() ;
экспериментальные значения
;
экспериментальные значения
нанести на график с соответствующими погрешностями (рис.5)
Эта зависимость должна иметь вид прямой:
![]()

4. Определить коэффициент наклона прямой (k) из треугольника АВС:

где А и В – произвольные точки на полученной прямой.
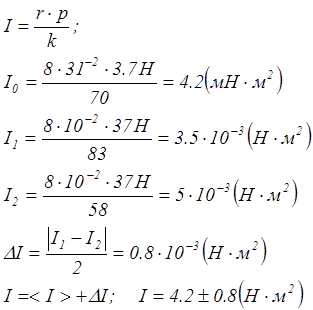
Вычислить I, используя формулу:

При вычислении погрешности для I необходимо учесть погрешность для величины k, которую можно оценить из графика следующим образом:
![]() ,
, ![]() ,
, 
тогда
 ,
,
где ![]() и
и ![]() - углы наклона крайних прямых, которые
можно провести через доверительные интервалы для
- углы наклона крайних прямых, которые
можно провести через доверительные интервалы для ![]() на
графике.
на
графике.
|
j =100° (1,745); r =15см |
||||||||||||||
|
j =60° (1,047) |
j =100° (1,745) |
n (об/мин) |
||||||||||||
|
n=3050об/мин |
r =9см |
r=11см |
r=13см |
r=15см |
n |
3050 |
4000 |
5000 |
6100 |
|||||
|
t1 |
17.586 |
9.928 |
13.939 |
8.936 |
t1 |
8.936 |
10.179 |
14.669 |
17.735 |
|||||
|
t2 |
17.674 |
10.549 |
14.940 |
9.199 |
t2 |
9.199 |
11.787 |
15.048 |
17.843 |
|||||
|
t3 |
16.714 |
9.272 |
11.737 |
9.549 |
t3 |
9.549 |
10.256 |
15.164 |
18.020 |
|||||
|
t4 |
19.065 |
10.491 |
12.417 |
6.199 |
t4 |
6.199 |
12.248 |
15.456 |
18.144 |
|||||
|
t5 |
20.197 |
9.745 |
13.214 |
8.764 |
t5 |
8.764 |
12.566 |
14.013 |
19.320 |
|||||
|
<t> |
18.247 |
9.997 |
13.249 |
8.529 |
<t> |
8.529 |
11.407 |
14.870 |
18.212 |
|||||
|
|
1.723 |
0.669 |
1.574 |
1.672 |
|
1.672 |
1.403 |
0.697 |
0.807 |
|||||
|
d t |
9% |
7% |
12% |
19% |
d t |
19% |
12% |
5% |
4% |
|||||
|
w |
0.057 |
0.105 |
0.132 |
0.205 |
w |
0.205 |
0.153 |
0.117 |
0.096 |
|||||
|
|
0.005 |
0.007 |
0.016 |
0.039 |
|
0.039 |
0.018 |
0.006 |
0.004 |
|||||
|
dw |
9% |
7% |
12% |
19% |
dw |
19% |
12% |
5% |
4% |
|||||
|
r /w |
35 |
38 |
45 |
39 |
wc-1 |
3.1 |
2.4 |
1.9 |
1.6 |
×10 -3 |
||||
|
< r /w> |
39.3 |
|||||||||||||
|
d( r /w) |
25% |
|||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|||||||
Пользуясь данными, полученными в процессе проведения работы, проведем необходимые вычисления:
1. ;
;  9% ;
9% ;
![]() ;
;  ;
;
2.  ;
;  7% ;
7% ; ![]() ;
;  ;
;
3.  ;
;  12% ;
12% ; ![]() ;
;  ;
;
4.  ;
;  19% ;
19% ; ![]() ;
;  ;
;
5. ; 19% ; ![]() ;
;  ;
;
6.  ; 12% ;
; 12% ; ![]() ;
;  ;
;
7.  ;
;  5% ;
5% ; ![]() ;
;  ;
;
8.  ;
;  4%
;
4%
; ![]() ;
;  ;
;
 |
k1=83; k2=58; k0=70; <k>=tga0=70
k=<k>±Dk

![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.